Node.js 源码剖析
Node.js的DNS模块使用了cares库和Libuv的线程池实现。cares是一个异步DNS解析库,它自己实现了DNS协议的封包和解析,配合Libuv事件驱动机制,在Node.js中实现异步的DNS解析。另外通过IP查询域名或者域名查询IP是直接调用操作系统提供的接口实现的,因为这两个函数是阻塞式的API,所以Node.js是通过Libuv的线程池实现异步查询。除了提供直接的DNS查询外,Node.js还提供了设置DNS服务器、新建一个DNS解析实例(Resolver)等功能。这些功能是使用cares实现的。下面我们开始分析DNS模块的原理和实现。
8.1 通过域名找IP
我们看一下在Node.js中如何查询一个域名对于的IP的信息
dns.lookup('www.a.com', function(err, address, family) {
console.log(address);
}); DNS功能的JS层实现在dns.js中
const req = new GetAddrInfoReqWrap();
req.callback = callback;
req.family = family;
req.hostname = hostname;
req.oncomplete = all ? onlookupall : onlookup;
const err = cares.getaddrinfo(
req, toASCII(hostname), family, hints, verbatim
); Node.js设置了一些参数后,调用cares_wrap.cc的getaddrinfo方法,在care_wrap.cc的初始化函数中我们看到, getaddrinfo函数对应的函数是GetAddrInfo。
void Initialize(Local<Object> target,
Local<Value> unused,
Local<Context> context) {
Environment* env = Environment::GetCurrent(context);
env->SetMethod(target, "getaddrinfo", GetAddrInfo);
...
} GetAddrInfo的主要逻辑如下
auto req_wrap = new GetAddrInfoReqWrap(env, req_wrap_obj, args[4]->IsTrue());
struct addrinfo hints;
memset(&hints, 0, sizeof(struct addrinfo));
hints.ai_family = family;
hints.ai_socktype = SOCK_STREAM;
hints.ai_flags = flags;
int err = uv_getaddrinfo(env->event_loop(),
req_wrap->req(),
AfterGetAddrInfo,
*hostname,
nullptr,
&hints); GetAddrInfo是对uv_getaddrinfo的封装,回调函数是AfterGetAddrInfo
int uv_getaddrinfo(uv_loop_t* loop,
// 上层传进来的req
uv_getaddrinfo_t* req,
// 解析完后的上层回调
uv_getaddrinfo_cb cb,
// 需要解析的名字
const char* hostname,
/*
查询的过滤条件:服务名。比如
http smtp。也可以是一个端口。
见下面注释
*/
const char* service,
// 其它查询过滤条件
const struct addrinfo* hints) {
size_t hostname_len;
size_t service_len;
size_t hints_len;
size_t len;
char* buf;
hostname_len = hostname ? strlen(hostname) + 1 : 0;
service_len = service ? strlen(service) + 1 : 0;
hints_len = hints ? sizeof(*hints) : 0;
buf = uv__malloc(hostname_len + service_len + hints_len);
uv__req_init(loop, req, UV_GETADDRINFO);
req->loop = loop;
// 设置请求的回调
req->cb = cb;
req->addrinfo = NULL;
req->hints = NULL;
req->service = NULL;
req->hostname = NULL;
req->retcode = 0;
len = 0;
if (hints) {
req->hints = memcpy(buf + len, hints, sizeof(*hints));
len += sizeof(*hints);
}
if (service) {
req->service = memcpy(buf + len, service, service_len);
len += service_len;
}
if (hostname)
req->hostname = memcpy(buf + len, hostname, hostname_len);
// 传了cb则是异步
if (cb) {
uv__work_submit(loop,
&req->work_req,
UV__WORK_SLOW_IO,
uv__getaddrinfo_work,
uv__getaddrinfo_done);
return 0;
} else {
// 阻塞式查询,然后执行回调
uv__getaddrinfo_work(&req->work_req);
uv__getaddrinfo_done(&req->work_req, 0);
return req->retcode;
}
} 我们看到这个函数首先是对一个request进行初始化,然后根据是否传了回调,决定走异步还是同步的模式。同步的方式比较简单,就是直接阻塞Libuv事件循环,直到解析完成。如果是异步,则给线程池提交一个慢IO的任务。其中工作函数是uv__getaddrinfo_work。回调是uv__getaddrinfo_done。我们看一下这两个函数。
// 解析的工作函数
static void uv__getaddrinfo_work(struct uv__work* w) {
uv_getaddrinfo_t* req;
int err;
// 根据结构体的字段获取结构体首地址
req = container_of(w, uv_getaddrinfo_t, work_req);
// 阻塞在这
err = getaddrinfo(req->hostname,
req->service,
req->hints,
&req->addrinfo);
req->retcode = uv__getaddrinfo_translate_error(err);
} uv__getaddrinfo_work函数主要是调用了系统提供的getaddrinfo去做解析。该函数会导致进程阻塞。结果返回后,执行uv__getaddrinfo_done。
static void uv__getaddrinfo_done(struct uv__work* w, int status) {
uv_getaddrinfo_t* req;
req = container_of(w, uv_getaddrinfo_t, work_req);
uv__req_unregister(req->loop, req);
// 释放初始化时申请的内存
if (req->hints)
uv__free(req->hints);
else if (req->service)
uv__free(req->service);
else if (req->hostname)
uv__free(req->hostname);
else
assert(0);
req->hints = NULL;
req->service = NULL;
req->hostname = NULL;
// 解析请求被用户取消了
if (status == UV_ECANCELED) {
assert(req->retcode == 0);
req->retcode = UV_EAI_CANCELED;
}
// 执行上层回调
if (req->cb)
req->cb(req, req->retcode, req->addrinfo);
} uv__getaddrinfo_done会执行C++层的回调,从而执行JS层的回调。
8.2 cares
除了通过IP查询域名和域名查询IP外,其余的DNS功能都由cares实现,我们看一下cares的基本用法。
8.2.1 cares使用和原理
// channel是cares的核心结构体
ares_channel channel;
struct ares_options options;
// 初始化channel
status = ares_init_options(&channel, &options, optmask);
// 把 argv的数据存到addr
ares_inet_pton(AF_INET, *argv, &addr4);
// 把addr数据存到channel并发起DNS查询
ares_gethostbyaddr(channel,
&addr4,
sizeof(addr4),
AF_INET,
callback,*argv);
for (;;)
{
int res;
FD_ZERO(&read_fds);
FD_ZERO(&write_fds);
// 把channel对应的fd存到read_fd和write_fds
nfds = ares_fds(channel, &read_fds, &write_fds);
if (nfds == 0)
break;
// 设置超时时间
tvp = ares_timeout(channel, NULL, &tv);
// 阻塞在select,等待DNS回包
res = select(nfds, &read_fds, &write_fds, NULL, tvp);
if (-1 == res)
break;
// 处理DNS相应
ares_process(channel, &read_fds, &write_fds);
} 上面是一个典型的事件驱动模型,首先初始化一些信息,然后发起一个非阻塞的请求,接着阻塞在多路复用API,该API返回后,执行触发了事件的回调。
8.2.2 cares_wrap.cc的通用逻辑
在Node.js中,Node.js和cares的整体交互如图8-1所示。
图8-1.
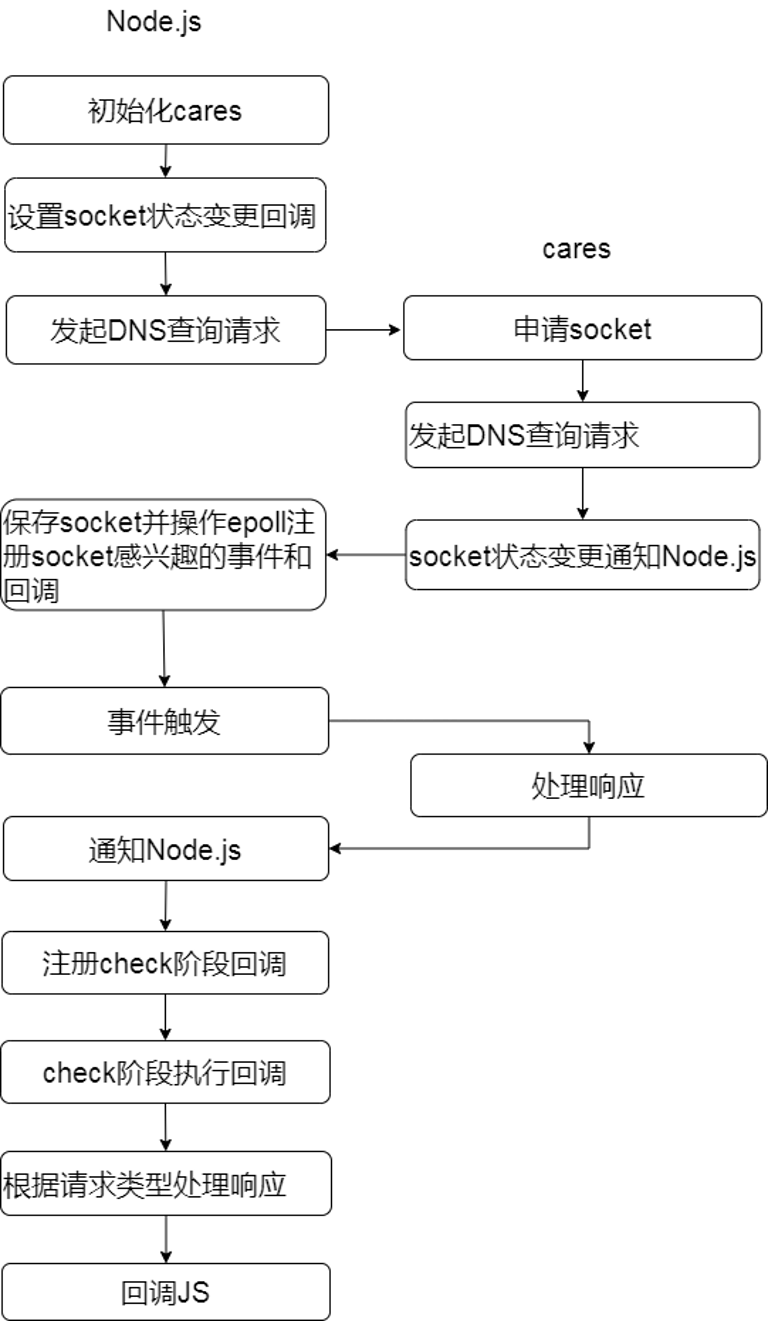
我们通过cares_wrap.cc分析其中的原理。我们从DNS模块提供的resolveCname函数开始。resolveCname函数由以下代码导出(dns.js)。
bindDefaultResolver(module.exports, getDefaultResolver()) 我们看一下这两个函数(dns/utils.js)。
class Resolver {
constructor() {
this._handle = new ChannelWrap();
}
// ...
}
let defaultResolver = new Resolver();
function getDefaultResolver() {
return defaultResolver;
}
function resolver(bindingName) {
function query(name, /* options, */ callback) {
let options;
const req = new QueryReqWrap();
req.bindingName = bindingName;
req.callback = callback;
req.hostname = name;
req.oncomplete = onresolve;
req.ttl = !!(options && options.ttl);
const err = this._handle[bindingName](req, toASCII(name));
if (err) throw dnsException(err, bindingName, name);
return req;
}
ObjectDefineProperty(query, 'name', { value: bindingName });
return query;
}
// 给原型链注入一个新的属性,defaultResolver中也生效
Resolver.prototype.resolveCname = resolveMap.CNAME = resolver('queryCname'); getDefaultResolver导出的是一个Resolve对象,里面有resolveCname等一系列方法。接着看一下bindDefaultResolver,我们一会再看ChannelWrap。
const resolverKeys = [
'resolveCname ',
// …
]
function bindDefaultResolver(target, source) {
resolverKeys.forEach((key) => {
target[key] = source[key].bind(defaultResolver);
});
} 看起来很绕,其实就是把Resolve对象的方法导出到DNS模块。这样用户就可以使用了。我们看到resolveCname是由resolver函数生成的,resolver函数对cares系列函数进行了封装,最终调用的是this._handle.queryCname函数。我们来看一下这个handle(ChannelWrap类对象)的实现(cares_wrap.cc)。我们先看一下cares_wrap.cc模块导出的API。
Local<FunctionTemplate> channel_wrap = env->NewFunctionTemplate(ChannelWrap::New);
channel_wrap->InstanceTemplate()->SetInternalFieldCount(1);
channel_wrap->Inherit(AsyncWrap::GetConstructorTemplate(env));
// Query是C++函数模板
env->SetProtoMethod(channel_wrap,
"queryCname",
Query<QueryCnameWrap>);
// ...
Local<String> channelWrapString = FIXED_ONE_BYTE_STRING(env->isolate(), "ChannelWrap");
channel_wrap->SetClassName(channelWrapString);
target->Set(env->context(),
channelWrapString,channel_wrap->GetFunction(context).ToLocalChecked()).Check(); handle对应的就是以上代码导出的对象。当我们在JS层执行new ChannelWrap的时候。 最终会调用C++层创建一个对象,并且执行ChannelWrap::New。
void ChannelWrap::New(const FunctionCallbackInfo<Value>& args) {
Environment* env = Environment::GetCurrent(args);
new ChannelWrap(env, args.This());
} 我们看一下类ChannelWrap的定义。
class ChannelWrap : public AsyncWrap {
public:
// ...
private:
// 超时管理
uv_timer_t* timer_handle_;
// cares数据类型
ares_channel channel_;
// 标记查询结果
bool query_last_ok_;
// 使用的DNS服务器
bool is_servers_default_;
// 是否已经初始化cares库
bool library_inited_;
// 正在发起的查询个数
int active_query_count_;
// 发起查询的任务队列
node_ares_task_list task_list_;
}; 接着我们看看ChannelWrap构造函数的代码。
ChannelWrap::ChannelWrap(...) {
Setup();
} ChannelWrap里直接调用了Setup
void ChannelWrap::Setup() {
struct ares_options options;
memset(&options, 0, sizeof(options));
options.flags = ARES_FLAG_NOCHECKRESP;
/*
caresd socket状态(读写)发生变更时,执行的函数,
第一个入参是sock_state_cb_data
*/
options.sock_state_cb = ares_sockstate_cb;
options.sock_state_cb_data = this;
// 还没初始化则初始化
if (!library_inited_) {
Mutex::ScopedLock lock(ares_library_mutex);
// 初始化cares库
ares_library_init(ARES_LIB_INIT_ALL);
}
// 设置使用cares的配置
ares_init_options(&channel_,
&options,
ARES_OPT_FLAGS | ARES_OPT_SOCK_STATE_CB);
library_inited_ = true;
} 我们看到,Node.js在这里初始化cares相关的逻辑。其中最重要的就是设置了cares socket状态变更时执行的回调ares_sockstate_cb(比如socket需要读取数据或者写入数据)。前面的cares使用例子中讲到了cares和事件驱动模块的配合使用,那么cares和Libuv是如何配合的呢?cares提供了一种机制,就是socket状态变更时通知事件驱动模块。DNS解析本质上也是网络IO,所以发起一个DNS查询也就是对应一个socket。DNS查询是由cares发起的,这就意味着socket是在cares中维护的,那Libuv怎么知道呢?正是cares提供的通知机制,使得Libuv知道发起DNS查询对应的socket,从而注册到Libuv中,等到事件触发后,再通知cares。下面我们看一下具体的实现。我们从发起一个cname查询开始分析。首先回顾一下cares_wrap模块导出的cname查询函数,
env->SetProtoMethod(channel_wrap, "queryCname", Query
template <class Wrap>
static void Query(const FunctionCallbackInfo<Value>& args) {
Environment* env = Environment::GetCurrent(args);
ChannelWrap* channel;
// Holder中保存了ChannelWrap对象,解包出来
ASSIGN_OR_RETURN_UNWRAP(&channel, args.Holder());
Local<Object> req_wrap_obj = args[0].As<Object>();
Local<String> string = args[1].As<String>();
/*
根据参数新建一个对象,这里是QueryCnameWrap,
并且保存对应的ChannelWrap对象和操作相关的对象
*/
Wrap* wrap = new Wrap(channel, req_wrap_obj);
node::Utf8Value name(env->isolate(), string);
// 发起请求数加一
channel->ModifyActivityQueryCount(1);
// 调用Send函数发起查询
int err = wrap->Send(*name);
if (err) {
channel->ModifyActivityQueryCount(-1);
delete wrap;
}
args.GetReturnValue().Set(err);
} Query只实现了一些通用的逻辑,然后调用Send函数,具体的Send函数逻辑由各个具体的类实现。
8.2.3 具体实现
我们看一下QueryCnameWrap类。
class QueryCnameWrap: public QueryWrap {
public:
QueryCnameWrap(ChannelWrap* channel,
Local<Object> req_wrap_obj)
: QueryWrap(channel, req_wrap_obj, "resolveCname") {
}
int Send(const char* name) override {
AresQuery(name, ns_c_in, ns_t_cname);
return 0;
}
protected:
void Parse(unsigned char* buf, int len) override {
HandleScope handle_scope(env()->isolate());
Context::Scope context_scope(env()->context());
Local<Array> ret = Array::New(env()->isolate());
int type = ns_t_cname;
int status = ParseGeneralReply(env(), buf, len, &type, ret);
if (status != ARES_SUCCESS) {
ParseError(status);
return;
}
this->CallOnComplete(ret);
}
}; 我们看到QueryCnameWrap类的实现非常简单,主要定义Send和Parse的实现,最终还是会调用基类对应的函数。我们看一下基类QueryWrap中AresQuery的实现。
void AresQuery(const char* name,
int dnsclass,
int type) {
ares_query(channel_->cares_channel(),
name,
dnsclass,
type,
Callback,
static_cast<void*>(this));
} AresQuery函数提供统一发送查询操作。查询完成后执行Callback回调。接下来就涉及到cares和Node.js的具体交互了。Node.js把一个任务交给cares后,cares会新建一个socket,接着cares会通过Node.js设置的回调ares_sockstate_cb通知Node.js。我们看一下ares_query的关键逻辑。
void ares_query(ares_channel channel, const char *name, int dnsclass,
int type, ares_callback callback, void *arg)
{
struct qquery *qquery;
unsigned char *qbuf;
int qlen, rd, status;
qquery = ares_malloc(sizeof(struct qquery));
// 保存Node.js的回调,查询完成时回调
qquery->callback = callback;
qquery->arg = arg;
ares_send(channel, qbuf, qlen, qcallback, qquery);
}
static void qcallback(void *arg, int status, int timeouts, unsigned char *abuf, int alen)
{
struct qquery *qquery = (struct qquery *) arg;
unsigned int ancount;
int rcode;
if (status != ARES_SUCCESS)
qquery->callback(qquery->arg, status, timeouts, abuf, alen);
else
{
// ...
// 执行Node.js回调
qquery->callback(qquery->arg,
status,
timeouts,
abuf,
alen);
}
ares_free(qquery);
}
ares_query保存了Node.js的回调,并且设置回调qcallback,查询成功后会回调qcallback,qcallback再回调Node.js。接着执行ares_send,ares_send会调用ares__send_query。
void ares__send_query(ares_channel channel,
struct query *query,
struct timeval *now)
{
struct server_state *server = &channel->servers[query->server];
if (server->udp_socket == ARES_SOCKET_BAD)
{
// 申请一个socket
if (open_udp_socket(channel, server) == -1)
{
skip_server(channel, query, query->server);
next_server(channel, query, now);
return;
}
}
// 发送DNS查询
if (socket_write(channel, server->udp_socket, query->qbuf, query->qlen) == -1)
{
skip_server(channel, query, query->server);
next_server(channel, query, now);
return;
}
} ares__send_query首先申请一个socket,然后发送数据。因为UDP不是面向连接的,可以直接发送。我们看一下open_udp_socket。
static int open_udp_socket(ares_channel channel, struct server_state *server)
{
ares_socket_t s;
ares_socklen_t salen;
union {
struct sockaddr_in sa4;
struct sockaddr_in6 sa6;
} saddr;
struct sockaddr *sa;
// 申请一个socket
s = open_socket(channel, server->addr.family, SOCK_DGRAM, 0);
// 绑定服务器地址
connect_socket(channel, s, sa, salen)
// 通知Node.js,1,0表示对socket的读事件感兴趣,因为发送了请求,等待响应
SOCK_STATE_CALLBACK(channel, s, 1, 0);
// 保存socket
server->udp_socket = s;
return 0;
}
#define SOCK_STATE_CALLBACK(c, s, r, w) \
do { \
if ((c)->sock_state_cb) \
(c)->sock_state_cb((c)->sock_state_cb_data, (s), (r), (w)); \
} WHILE_FALSE
ares__send_query函数做了三件事 1 申请了socket, 2 通知Node.js 3 发送了DNS查询请求 这时候流程走到了Node.js,我们看一下cares回调Node.js的时候,Node.js怎么处理的
struct node_ares_task : public MemoryRetainer {
ChannelWrap* channel;
// 关联的socket
ares_socket_t sock;
// IO观察者和回调
uv_poll_t poll_watcher;
};
void ares_sockstate_cb(void* data,
ares_socket_t sock,
int read,
int write) {
ChannelWrap* channel = static_cast<ChannelWrap*>(data);
node_ares_task* task;
// 任务
node_ares_task lookup_task;
lookup_task.sock = sock;
// 该任务是否已经存在
auto it = channel->task_list()->find(&lookup_task);
task = (it == channel->task_list()->end()) ? nullptr : *it;
if (read || write) {
if (!task) {
// 开启定时器,超时后通知cares
channel->StartTimer();
// 创建一个任务
task = ares_task_create(channel, sock);
// 保存到任务列表
channel->task_list()->insert(task);
}
// 注册IO观察者到epoll,感兴趣的事件根据cares传的进行设置,有事件触发后执行回调ares_poll_cb
uv_poll_start(&task->poll_watcher,
(read ? UV_READABLE : 0) | (write ? UV_WRITABLE : 0),
ares_poll_cb);
} else {
// socket关闭了,删除任务
channel->task_list()->erase(it);
// 关闭该任务对应观察者io,然后删除删除该任务
channel->env()->CloseHandle(&task->poll_watcher, ares_poll_close_cb);
// 没有任务了,关闭定时器
if (channel->task_list()->empty()) {
channel->CloseTimer();
}
}
} 每一个DNS查询的任务,在Node.js中用node_ares_task 管理。它封装了请求对应的channel、查询请求对应的socket和uv_poll_t。我们看一下ares_task_create
node_ares_task* ares_task_create(ChannelWrap* channel, ares_socket_t sock) {
auto task = new node_ares_task();
task->channel = channel;
task->sock = sock;
// 初始化uv_poll_t,保存文件描述符sock到uv_poll_t
if (uv_poll_init_socket(channel->env()->event_loop(),&task->poll_watcher, sock) < 0) {
delete task;
return nullptr;
}
return task;
} 首先创建一个node_ares_task对象。然后初始化uv_poll_t并且把文件描述符保存到uv_poll_t。uv_poll_t是对文件描述符、回调、IO观察者的封装。文件描述符的事件触发时,会执行IO观察者的回调,从而执行uv_poll_t保存的回调。我们继续回到ares_sockstate_cb,当cares通知Node.js socket状态变更的时候,Node.js就会修改epoll节点的配置(感兴趣的事件)。当事件触发的时候,会执行ares_poll_cb。我们看一下该函数。
void ares_poll_cb(uv_poll_t* watcher, int status, int events) {
node_ares_task* task = ContainerOf(&node_ares_task::poll_watcher, watcher);
ChannelWrap* channel = task->channel;
// 有事件触发,重置超时时间
uv_timer_again(channel->timer_handle());
// 通知cares处理响应
ares_process_fd(channel->cares_channel(),
events & UV_READABLE ? task->sock : ARES_SOCKET_BAD,
events & UV_WRITABLE ? task->sock : ARES_SOCKET_BAD);
} 当socket上感兴趣的事件触发时,Node.js调ares_process_fd处理。真正的处理函数是processfds。
static void processfds(ares_channel channel,
fd_set *read_fds, ares_socket_t read_fd,
fd_set *write_fds, ares_socket_t write_fd)
{
struct timeval now = ares__tvnow();
write_tcp_data(channel, write_fds, write_fd, &now);
read_tcp_data(channel, read_fds, read_fd, &now);
read_udp_packets(channel, read_fds, read_fd, &now);
process_timeouts(channel, &now);
process_broken_connections(channel, &now);
} processfds是统一的处理函数,在各自函数内会做相应的判断和处理。我们这里是收到了UDP响应。则会执行read_udp_packets
static void read_udp_packets(ares_channel channel, fd_set *read_fds,
ares_socket_t read_fd, struct timeval *now){
// 读取响应
count = socket_recvfrom(channel, server->udp_socket, (void *)buf, sizeof(buf), 0, &from.sa, &fromlen);
// 处理响应,最终调用query->callback回调Node.js
process_answer(channel, buf, (int)count, i, 0, now);
} Cares读取响应然后解析响应,最后回调Node.js。Node.js设置的回调函数是Callback
static void Callback(void* arg, int status, int timeouts,
unsigned char* answer_buf, int answer_len) {
QueryWrap* wrap = FromCallbackPointer(arg);
unsigned char* buf_copy = nullptr;
if (status == ARES_SUCCESS) {
buf_copy = node::Malloc<unsigned char>(answer_len);
memcpy(buf_copy, answer_buf, answer_len);
}
wrap->response_data_ = std::make_unique<ResponseData>();
ResponseData* data = wrap->response_data_.get();
data->status = status;
data->is_host = false;
data->buf = MallocedBuffer<unsigned char>(buf_copy, answer_len);
// 执行QueueResponseCallback
wrap->QueueResponseCallback(status);
}
void QueueResponseCallback(int status) {
BaseObjectPtr<QueryWrap> strong_ref{this};
// 产生一个native immediate任务,在check阶段执行
env()->SetImmediate([this, strong_ref](Environment*) {
// check阶段执行
AfterResponse();
// Delete once strong_ref goes out of scope.
Detach();
});
channel_->set_query_last_ok(status != ARES_ECONNREFUSED);
channel_->ModifyActivityQueryCount(-1);
}
void AfterResponse() {
const int status = response_data_->status;
// 调用对应的子类的Parse
if (status != ARES_SUCCESS) {
ParseError(status);
} else if (!response_data_->is_host) {
Parse(response_data_->buf.data, response_data_->buf.size);
} else {
Parse(response_data_->host.get());
}
} 任务完成后,Node.js会在check阶段(Node.js v10是使用async handle通知Libuv)加入一个节点,然后check阶段的时候执行对应子类的Parse函数,这里以QueryCnameWrap的Parse为例。
void Parse(unsigned char* buf, int len) override {
HandleScope handle_scope(env()->isolate());
Context::Scope context_scope(env()->context());
Local<Array> ret = Array::New(env()->isolate());
int type = ns_t_cname;
int status = ParseGeneralReply(env(), buf, len, &type, ret);
if (status != ARES_SUCCESS) {
ParseError(status);
return;
}
this->CallOnComplete(ret);
} 收到DNS回复后,调用ParseGeneralReply解析回包,然后执行JS层DNS模块的回调。从而执行用户的回调。
void CallOnComplete(Local<Value> answer,
Local<Value> extra = Local<Value>()) {
HandleScope handle_scope(env()->isolate());
Context::Scope context_scope(env()->context());
Local<Value> argv[] = {
Integer::New(env()->isolate(), 0),
answer,
extra
};
const int argc = arraysize(argv) - extra.IsEmpty();
MakeCallback(env()->oncomplete_string(), argc, argv);
}