在引进Compacting GC后,ART运行时优化了堆内存分配过程。最显著特点是为每个ART运行时线程增加局部分配缓冲区(Thead Local Allocation Buffer)和在OOM前进行一次同构空间压缩(Homogeneous Space Compact)。前者可提高堆内存分配效率,后者可解决内存碎片问题。本文就对ART运行时引进Compacting GC后的堆内存分配过程进行分析。
《Android系统源代码情景分析》一书正在进击的程序员网(http://0xcc0xcd.com)中连载,点击进入!
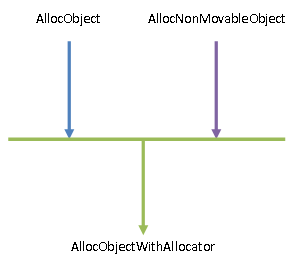
从接口层面上看,除了提供常规的对象分配接口AllocObject,ART运行时的堆还提供了一个专门用于分配非移动对象的接口AllocNonMovableObject,如图1所示:
图1 ART运行时堆提供的对象分配接口
非移动对象指的是保存在前面ART运行时Compacting GC堆创建过程分析一篇文章提到的Non-Moving Space的对象,主要包括那些在类加载过程中创建的类对象(Class)、类方法对象(ArtMethod)和类成员变量对象(ArtField)等,以及那些在经历过若干次Generational Semi-Space GC之后仍然存活的对象。前者是通过AllocNonMovableObject接口分配的,而后者是在执行Generational Semi-Space GC过程移动过去的。本文主要关注通过AllocNonMovableObject接口分配的非移动对象。
无论是通过AllocObject接口分配对象,还是通过AllocNonMovableObject接口分配对象,最后都统一调用了另外一个接口AllocObjectWithAllocator进行具体的分配过程,如下所示:
class Heap {
public:
......
// Allocates and initializes storage for an object instance.
template <bool kInstrumented, typename PreFenceVisitor>
mirror::Object* AllocObject(Thread* self, mirror::Class* klass, size_t num_bytes,
const PreFenceVisitor& pre_fence_visitor)
SHARED_LOCKS_REQUIRED(Locks::mutator_lock_) {
return AllocObjectWithAllocator<kInstrumented, true>(self, klass, num_bytes,
GetCurrentAllocator(),
pre_fence_visitor);
}
template <bool kInstrumented, typename PreFenceVisitor>
mirror::Object* AllocNonMovableObject(Thread* self, mirror::Class* klass, size_t num_bytes,
const PreFenceVisitor& pre_fence_visitor)
SHARED_LOCKS_REQUIRED(Locks::mutator_lock_) {
return AllocObjectWithAllocator<kInstrumented, true>(self, klass, num_bytes,
GetCurrentNonMovingAllocator(),
pre_fence_visitor);
}
template <bool kInstrumented, bool kCheckLargeObject, typename PreFenceVisitor>
ALWAYS_INLINE mirror::Object* AllocObjectWithAllocator(
Thread* self, mirror::Class* klass, size_t byte_count, AllocatorType allocator,
const PreFenceVisitor& pre_fence_visitor)
SHARED_LOCKS_REQUIRED(Locks::mutator_lock_);
AllocatorType GetCurrentAllocator() const {
return current_allocator_;
}
AllocatorType GetCurrentNonMovingAllocator() const {
return current_non_moving_allocator_;
}
......
private:
......
// Allocator type.
AllocatorType current_allocator_;
const AllocatorType current_non_moving_allocator_;
......
};这五个函数定义在文件art/runtime/gc/heap.h
在Heap类的成员函数AllocObject和AllocNonMovableObject中,参数self描述的是当前线程,klass描述的是要分配的对象所属的类型,参数num_bytes描述的是要分配的对象的大小,最后一个参数pre_fence_visitor是一个回调函数,用来在分配对象完成后在当前执行路径中执行初始化操作,例如分配完成一个数组对象,通过该回调函数立即设置数组的大小,这样就可以保证数组对象的完整性和一致性,避免多线程环境下通过加锁来完成相同的操作。
Heap类的成员函数AllocObjectWithAllocator需要另外一个额外的类型为AllocatorType的参数来描述分配器的类型,也就是描述要在哪个空间分配对象。AllocatorType是一个枚举类型,它的定义如下所示:
// Different types of allocators.
enum AllocatorType {
kAllocatorTypeBumpPointer, // Use BumpPointer allocator, has entrypoints.
kAllocatorTypeTLAB, // Use TLAB allocator, has entrypoints.
kAllocatorTypeRosAlloc, // Use RosAlloc allocator, has entrypoints.
kAllocatorTypeDlMalloc, // Use dlmalloc allocator, has entrypoints.
kAllocatorTypeNonMoving, // Special allocator for non moving objects, doesn't have entrypoints.
kAllocatorTypeLOS, // Large object space, also doesn't have entrypoints.
};这个枚举类型定义在文件/art/runtime/gc/allocator_type.h。
AllocatorType一共有六个值,它们的含义如下所示:
kAllocatorTypeBumpPointer:表示在Bump Pointer Space中分配对象。
kAllocatorTypeTLAB:表示要在由Bump Pointer Space提供的线程局部分配缓冲区中分配对象。
kAllocatorTypeRosAlloc:表示要在Ros Alloc Space分配对象。
kAllocatorTypeDlMalloc:表示要在Dl Malloc Space分配对象。
kAllocatorTypeNonMoving:表示要在Non Moving Space分配对象。
kAllocatorTypeLOS:表示要在Large Object Space分配对象。
Heap类的成员函数AllocObject和AllocNonMovableObject使用的分配器类型分别是由成员变量current_allocator_和current_non_moving_allocator_决定的。前者的值与当前使用的GC类型有关。当GC类型发生变化时,就会调用Heap类的成员函数ChangeCollector来修改当前使用的GC,同时也会调用另外一个成员函数ChangeAllocator来修改Heap类的成员变量current_allocator_的值。由于ART运行时只有一个Non-Moving Space,因此后者的值就固定为kAllocatorTypeNonMoving。
Heap类的成员函数ChangeCollector的实现如下所示:
void Heap::ChangeCollector(CollectorType collector_type) {
// TODO: Only do this with all mutators suspended to avoid races.
if (collector_type != collector_type_) {
......
collector_type_ = collector_type;
gc_plan_.clear();
switch (collector_type_) {
case kCollectorTypeCC: // Fall-through.
case kCollectorTypeMC: // Fall-through.
case kCollectorTypeSS: // Fall-through.
case kCollectorTypeGSS: {
gc_plan_.push_back(collector::kGcTypeFull);
if (use_tlab_) {
ChangeAllocator(kAllocatorTypeTLAB);
} else {
ChangeAllocator(kAllocatorTypeBumpPointer);
}
break;
}
case kCollectorTypeMS: {
gc_plan_.push_back(collector::kGcTypeSticky);
gc_plan_.push_back(collector::kGcTypePartial);
gc_plan_.push_back(collector::kGcTypeFull);
ChangeAllocator(kUseRosAlloc ? kAllocatorTypeRosAlloc : kAllocatorTypeDlMalloc);
break;
}
case kCollectorTypeCMS: {
gc_plan_.push_back(collector::kGcTypeSticky);
gc_plan_.push_back(collector::kGcTypePartial);
gc_plan_.push_back(collector::kGcTypeFull);
ChangeAllocator(kUseRosAlloc ? kAllocatorTypeRosAlloc : kAllocatorTypeDlMalloc);
break;
}
default: {
LOG(FATAL) << "Unimplemented";
}
}
......
}
}这个函数定义在文件ime/gc/heap.cc中。
从这里我们就可以看到,对于Compacting GC,它们使用的分配器类型只可能为kAllocatorTypeTLAB或者kAllocatorTypeBumpPointer,取决定Heap类的成员变量use_tlab_的值。Heap类的成员变量use_tlab_的值默认为false,但是可以通过ART运行时启动选项-XX:UseTLAB来设置为true。对于Mark-Sweep GC来说,它们使用的分配器类型只可能为kAllocatorTypeRosAlloc或者kAllocatorTypeDlMalloc,取决于常量kUseRosAlloc的值。
此外,我们还可以看到,根据当前使用的GC不同,Heap类的成员变量gc_plan_会被设置为不同的值,用来表示在分配对象过程中遇到内存不足时,应该执行的GC粒度。对于Compacting GC来说,只有一种GC粒度可执行,那就是kGcTypeFull,实际上就是说对Bump Pointer Space的所有不可达对象进行回收。对于Mark-Sweep GC来说,有三种GC粒度可执行,分别是kGcTypeSticky、kGcTypePartial和kGcTypeFull。这三者的含义可以参考前面ART运行时垃圾收集(GC)过程分析一文。后面我们继续对象分配过程时,也可以看到Heap类的成员变量gc_plan_的用途。
Heap类的成员函数ChangeAllocator的实现如下所示:
void Heap::ChangeAllocator(AllocatorType allocator) {
if (current_allocator_ != allocator) {
......
current_allocator_ = allocator;
MutexLock mu(nullptr, *Locks::runtime_shutdown_lock_);
SetQuickAllocEntryPointsAllocator(current_allocator_);
......
}
}这个函数定义在文件ime/gc/heap.cc中。
Heap类的成员函数ChangeAllocator除了设置成员变量current_allocator_的值之外,还会调用函数SetQuickAllocEntryPointsAllocator来修改提供给Native Code的用来分配对象的入口点函数,以便Native Code可以在ART运行时切换GC时使用正常的接口来分配对象。这里所谓的Native Code,就是APK在安装时通过翻译DEX字节码得到的本地机器指令。
了解了分配器的类型之后,接下来我们就继续分析Heap类的成员函数AllocObjectWithAllocator的实现,如下所示:
template <bool kInstrumented, bool kCheckLargeObject, typename PreFenceVisitor>
inline mirror::Object* Heap::AllocObjectWithAllocator(Thread* self, mirror::Class* klass,
size_t byte_count, AllocatorType allocator,
const PreFenceVisitor& pre_fence_visitor) {
......
if (kCheckLargeObject && UNLIKELY(ShouldAllocLargeObject(klass, byte_count))) {
return AllocLargeObject<kInstrumented, PreFenceVisitor>(self, klass, byte_count,
pre_fence_visitor);
}
mirror::Object* obj;
......
if (allocator == kAllocatorTypeTLAB) {
byte_count = RoundUp(byte_count, space::BumpPointerSpace::kAlignment);
}
if (allocator == kAllocatorTypeTLAB && byte_count <= self->TlabSize()) {
obj = self->AllocTlab(byte_count);
......
obj->SetClass(klass);
......
pre_fence_visitor(obj, usable_size);
......
} else {
obj = TryToAllocate<kInstrumented, false>(self, allocator, byte_count, &bytes_allocated,
&usable_size);
if (UNLIKELY(obj == nullptr)) {
bool is_current_allocator = allocator == GetCurrentAllocator();
obj = AllocateInternalWithGc(self, allocator, byte_count, &bytes_allocated, &usable_size,
&klass);
if (obj == nullptr) {
bool after_is_current_allocator = allocator == GetCurrentAllocator();
// If there is a pending exception, fail the allocation right away since the next one
// could cause OOM and abort the runtime.
if (!self->IsExceptionPending() && is_current_allocator && !after_is_current_allocator) {
// If the allocator changed, we need to restart the allocation.
return AllocObject<kInstrumented>(self, klass, byte_count, pre_fence_visitor);
}
return nullptr;
}
}
......
obj->SetClass(klass);
......
pre_fence_visitor(obj, usable_size);
......
}
......
if (AllocatorHasAllocationStack(allocator)) {
PushOnAllocationStack(self, &obj);
}
......
if (AllocatorMayHaveConcurrentGC(allocator) && IsGcConcurrent()) {
CheckConcurrentGC(self, new_num_bytes_allocated, &obj);
}
......
return obj;
}这个函数定义在文件art/runtime/gc/heap-inl.h中。
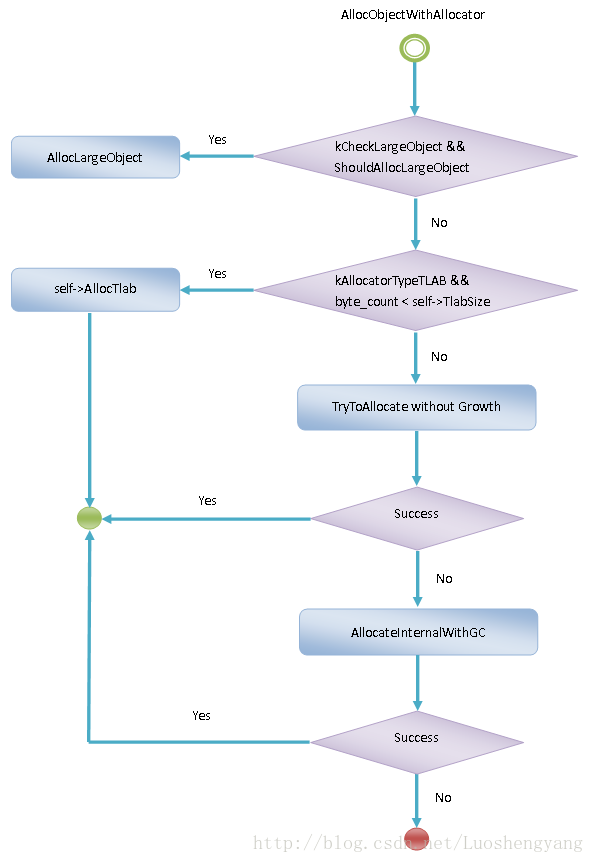
Heap类的成员函数AllocObjectWithAllocator分配对象的主要逻辑如图2所示:
图2 AllocObjectWithAllocator分配对象过程
首先,如果模板参数kCheckLargeObject等于true,并且要分配的是一个原子类型数组,且该为数组的大小大于预先设置的值,那么忽略掉参数allocator,而是调用Heap类的另外一个成员函数AllocLargeObject直接在Large Object Space中分配内存。后一个条件是通过调用Heap类的成员函数ShouldAllocLargeObject来判断是否满足的,它的实现如下所示:
inline bool Heap::ShouldAllocLargeObject(mirror::Class* c, size_t byte_count) const {
// We need to have a zygote space or else our newly allocated large object can end up in the
// Zygote resulting in it being prematurely freed.
// We can only do this for primitive objects since large objects will not be within the card table
// range. This also means that we rely on SetClass not dirtying the object's card.
return byte_count >= large_object_threshold_ && c->IsPrimitiveArray();
}这个函数定义在文件art/runtime/gc/heap-inl.h中。
Heap类的成员变量large_object_threshold_初始化为kDefaultLargeObjectThreshold,后者又定义为3个内存页大小。也就是说,当分配的原子类型数组大小大于等于3个内存页时,就在Large Object Space中进行分配。
回到Heap类的成员AllocObjectWithAllocator中,如果指定了要在当前ART运行时线程的TLAB中分配对象,并且这时候当前ART运行时线程的TLAB的剩余大小大于请求分配的对象大小,那么就直接在当前线程的TLAB中分配。ART运行时线程的TLAB实际上是来自于Bump Pointer Space上的,后面我们就可以看到这一点。
如果上面的条件都不成立,接下来就调用Heap类的成员函数TryToAllocate来进行分配了。Heap类的成员函数TryToAllocate会根据参数allocator,在指定的Space分配内存,同时会根据第二个模板参数来决定是否要在允许的范围内增加Space的大小限制,以便可以满足分配要求。这里指定Heap类的成员函数TryToAllocate的值为false,就表示现在在不增长Space的大小限制的前提下为对象分配内存。
如果Heap类的成员函数TryToAllocate不能成功分配到指定大小的内存,那么就需要调用Heap类的成员函数AllocateInternalWithGc来先执行必要的GC,再尝试分配请求的内存了。
如果Heap类的成员函数AllocateInternalWithGc也不能成功分配到内存,那就表明是分配失败了。不过有一个例外,那就是ART运行时当前使用分配器类型发生了变化,这种情况就需要重新调用Heap类的成员函数AllocObject重启分配过程。从上面的分析可以知道,当ART运行时当前使用的GC发生切换时,ART运行时当前使用的分配器类型也会随着变化,因此这时候重新调用Heap类的成员函数AllocObject,就可以使用当前的分配器来分配对象。
假设前面成功分配了到指定的内存,接下来还有两件事情需要做。
第一件事情是调用Heap类的成员函数AllocatorHasAllocationStack判断参数allocator指定的分配器是否与ART运行时的Allocation Stack有关。如果有关的话,那么就需要将刚才成功分配到的对象通过调用Heap类的成员函数PushOnAllocationStack压入到ART运行时的Allocation Stack中,以便以后可以执行Sticky GC。关于Sticky GC,可以参考前面ART运行时垃圾收集(GC)过程分析一文。
Heap类的成员函数AllocatorHasAllocationStack的实现如下所示:
class Heap {
public:
......
static ALWAYS_INLINE bool AllocatorHasAllocationStack(AllocatorType allocator_type) {
return
allocator_type != kAllocatorTypeBumpPointer &&
allocator_type != kAllocatorTypeTLAB;
}
......
};这个函数定义在文件art/runtime/gc/heap.h中。
前面提到,ART运行时线程的TLAB是来自于Bump Pointer Space的,而Bump Pointer Space是与Compacting GC相关的,Allocation Stack是与Sticky GC相关的,这就意味着Compacting GC不会执行Sticky类型的GC。
第二件事情是调用Heap类的成员函数AllocatorMayHaveConcurrentGC判断参数allocator指定的分配器是否与Concurrent GC相关,并且当前使用的GC就是一个Concurrent GC。如果条件都成立的话,就调用Heap类的成员函数CheckConcurrentGC检查是否需要发起一个Concurrent GC请求。
Heap类的成员函数AllocatorMayHaveConcurrentGC的实现如下所示:
class Heap {
public:
......
static ALWAYS_INLINE bool AllocatorMayHaveConcurrentGC(AllocatorType allocator_type) {
return AllocatorHasAllocationStack(allocator_type);
}
......
};这个函数定义在文件art/runtime/gc/heap.h中。
Heap类的成员函数AllocatorMayHaveConcurrentGC的判断逻辑与上面分析的成员函数AllocatorHasAllocationStack是一样的,这就意味着目前提供的Compacting GC都是非Concurrent的。不过以后是会提供具有Concurrent功能的Compacting GC的,称为Concurrent Copying GC。
以上就是Heap类的成员函数AllocObjectWithAllocator的实现,接下来我们继续分析Heap类的成员函数TryToAllocate和AllocateInternalWithGc的实现,以便可以更好地了解ART运行时分配对象的过程。这也有利用我们后面分析ART运行时的Compacting GC的执行过程。
Heap类的成员函数TryToAllocate的实现如下所示:
template <const bool kInstrumented, const bool kGrow>
inline mirror::Object* Heap::TryToAllocate(Thread* self, AllocatorType allocator_type,
size_t alloc_size, size_t* bytes_allocated,
size_t* usable_size) {
if (allocator_type != kAllocatorTypeTLAB &&
UNLIKELY(IsOutOfMemoryOnAllocation<kGrow>(allocator_type, alloc_size))) {
return nullptr;
}
mirror::Object* ret;
switch (allocator_type) {
case kAllocatorTypeBumpPointer: {
DCHECK(bump_pointer_space_ != nullptr);
alloc_size = RoundUp(alloc_size, space::BumpPointerSpace::kAlignment);
ret = bump_pointer_space_->AllocNonvirtual(alloc_size);
if (LIKELY(ret != nullptr)) {
*bytes_allocated = alloc_size;
*usable_size = alloc_size;
}
break;
}
case kAllocatorTypeRosAlloc: {
if (kInstrumented && UNLIKELY(running_on_valgrind_)) {
// If running on valgrind, we should be using the instrumented path.
ret = rosalloc_space_->Alloc(self, alloc_size, bytes_allocated, usable_size);
} else {
DCHECK(!running_on_valgrind_);
ret = rosalloc_space_->AllocNonvirtual(self, alloc_size, bytes_allocated, usable_size);
}
break;
}
case kAllocatorTypeDlMalloc: {
if (kInstrumented && UNLIKELY(running_on_valgrind_)) {
// If running on valgrind, we should be using the instrumented path.
ret = dlmalloc_space_->Alloc(self, alloc_size, bytes_allocated, usable_size);
} else {
DCHECK(!running_on_valgrind_);
ret = dlmalloc_space_->AllocNonvirtual(self, alloc_size, bytes_allocated, usable_size);
}
break;
}
case kAllocatorTypeNonMoving: {
ret = non_moving_space_->Alloc(self, alloc_size, bytes_allocated, usable_size);
break;
}
case kAllocatorTypeLOS: {
ret = large_object_space_->Alloc(self, alloc_size, bytes_allocated, usable_size);
// Note that the bump pointer spaces aren't necessarily next to
// the other continuous spaces like the non-moving alloc space or
// the zygote space.
DCHECK(ret == nullptr || large_object_space_->Contains(ret));
break;
}
case kAllocatorTypeTLAB: {
DCHECK_ALIGNED(alloc_size, space::BumpPointerSpace::kAlignment);
if (UNLIKELY(self->TlabSize() < alloc_size)) {
const size_t new_tlab_size = alloc_size + kDefaultTLABSize;
if (UNLIKELY(IsOutOfMemoryOnAllocation<kGrow>(allocator_type, new_tlab_size))) {
return nullptr;
}
// Try allocating a new thread local buffer, if the allocaiton fails the space must be
// full so return nullptr.
if (!bump_pointer_space_->AllocNewTlab(self, new_tlab_size)) {
return nullptr;
}
*bytes_allocated = new_tlab_size;
} else {
*bytes_allocated = 0;
}
// The allocation can't fail.
ret = self->AllocTlab(alloc_size);
DCHECK(ret != nullptr);
*usable_size = alloc_size;
break;
}
default: {
LOG(FATAL) << "Invalid allocator type";
ret = nullptr;
}
}
return ret;
}这个函数定义在文件art/runtime/gc/heap.h中。
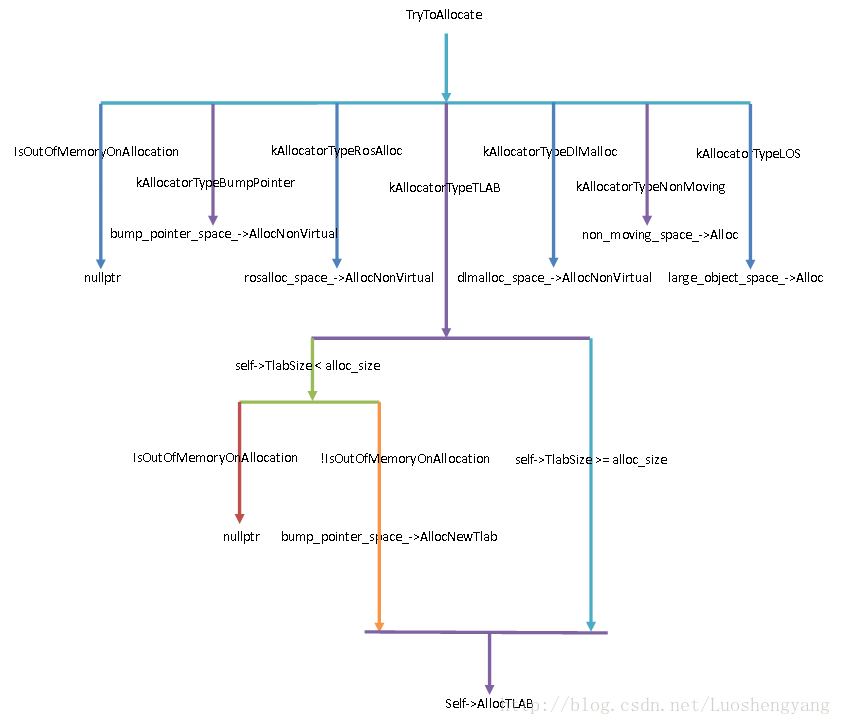
Heap类的成员函数TryToAllocate的实现是很直觉的,我们可以通过图3来描述:
图3 TryToAllocate分配对象过程
首先,如果不是指定在当前ART运行时线程的TLAB中分配对象,并且指定分配的对象大小超出了当前堆的限制,那么就会分配失败,返回一个nullptr指针。
接下来,就根据参数allocator指定的分配器在不同的Space中分配对象:
1. 指定在Bump Pointer Space中分配对象,就调用Heap类的成员变量bump_pointer_space_指向的一个BumpPointerSpace对象的成员函数AllocNonvirtual分配指定大小的内存。
2. 指定在Ros Alloc Space中分配对象,就调用Heap类的成员变量rosalloc_space_指向的一个RosAllocSpace对象的成员函数Alloc者AllocNonvirtual分配指定大小的内存。当模板参数kInstrumented的值等于true,并且Heap类的成员变量running_on_valgrind_的值等于true时,就调用RosAllocSpace类的成员函数Alloc进行分配。否则的话,就调用RosAllocSpace类的成员函数AllocNonvirtual进行分配。从Heap类的成员变量running_on_valgrind_的命令就可以很容易推断出,调用RosAllocSpace类的成员函数Alloc分配的内存具有非法内存访问检查功能,在前面ART运行时为新创建对象分配内存的过程分析一篇文章中,我们有提到这种内存分配方式。
3. 指定在Dl Malloc Space中分配对象,就调用Heap类的成员变量dlmalloc_space_指向的一个DlMallocSpace对象的成员函数Alloc者AllocNonvirtual分配指定大小的内存。这一点与在Ros Alloc Space中分配对象的逻辑是完全一致的,除了一个是在Dl Malloc Space中分配内存, 另一个是在Ros Alloc Space中分配对象之外。
4. 指定在Non Moving Space中分配对象,就调用Heap类的成员变量non_moving_space_指向的一个RosAllocSpace对象或者DlMallocSpace对象的成员函数Alloc分配指定大小的内存。从前面ART运行时Compacting GC堆创建过程分析一文可以知道,Heap类的成员变量non_moving_space_指向的可能是一个Ros Alloc Space,也有可能是一个Dl Malloc Space。
5. 指定在Large Object Space中分配对象,就调用Heap类的成员变量large_object_space_指向的一个FreeListSpace对象或者LargeObjectMapSpace对象的成员函数Alloc分配指定大小的内存。FreeListSpace和LargeObjectMapSpace类是用来描述ART运行时的Large Object Space的,它们的实现方式在前面ART运行时Java堆创建过程分析一文中有介绍。
6. 指定在当前ART运行时线程的TLAB中分配对象。这种情况下首先判断当前ART运行时线程的TLAB剩余大小是否能够满足分配请求的内存大小。如果不能满足,并且没有超出当前堆的限制,那么就会首先Heap类的成员变量bump_pointer_space_指向的一个BumpPointerSpace对象的成员函数AllocNewTlab重新分配一块可以满足当前请求的TLAB,然后再调用参数self描述的一个Thread对象的成员函数AllocTlab在当前ART运行时线程的TLAB中分配对象。另一方面,如果当前ART运行时线程的TLAB剩余大小不能够满足分配请求的内存大小,而且请求分配的内存大小又超出了当前堆的限制,那么当前分配请求就失败了,于是就返回一个nullptr。最后,如果当前ART运行时线程的TLAB剩余大小能够满足分配请求的内存大小,那么就直接调用参数self描述的一个Thread对象的成员函数AllocTlab在当前ART运行时线程的TLAB中分配对象。
对于在Dl Malloc Space和Large Object Space分配对象的过程,我们在前面ART运行时为新创建对象分配内存的过程分析一篇文章中已经分析过了,因此接下来我们就主要分析在当前ART运行时线程的TLAB、Bump Pointer Space和Ros Alloc Space中分配对象的过程,以便后面我们可以更好理解Compacting GC的执行过程。
我们首先看在当前ART运行时线程的TLAB分配对象的过程。这里又为两个子过程。
第一个子过程是调用BumpPointerSpace类的成员函数AllocNewTlab为当前ART运行时线程分配一块TLAB,它的实现如下所示:
bool BumpPointerSpace::AllocNewTlab(Thread* self, size_t bytes) {
MutexLock mu(Thread::Current(), block_lock_);
RevokeThreadLocalBuffersLocked(self);
byte* start = AllocBlock(bytes);
if (start == nullptr) {
return false;
}
self->SetTlab(start, start + bytes);
return true;
}这个函数定义在文件art/runtime/gc/space/bump_pointer_space.cc中。
BumpPointerSpace类的成员函数AllocNewTlab首先是调用成员函数RevokeThreadLocalBuffersLocked撤销当前ART运行时线程的TLAB,因为之前可能给它分配过TLAB,接着再调用成员函数AllocBlock在Bump Pointer Space中分配一块由参数bytes指定的内存块,并且调用Thread类的成员函数SetTlab将该内存块设置为当前ART运行时线程新的TLAB。接下来我们就继续分析上述三个函数的实现。
BumpPointerSpace类的成员函数RevokeThreadLocalBuffersLocked的实现如下所示:
void BumpPointerSpace::RevokeThreadLocalBuffersLocked(Thread* thread) {
objects_allocated_.FetchAndAddSequentiallyConsistent(thread->GetThreadLocalObjectsAllocated());
bytes_allocated_.FetchAndAddSequentiallyConsistent(thread->GetThreadLocalBytesAllocated());
thread->SetTlab(nullptr, nullptr);
}这个函数定义在文件art/runtime/gc/space/bump_pointer_space.cc中。
由于ART运行时线程的TLAB只是记录了它指向的内存块的起始地址和结束地址,而实际的内存块是位于Bump Pointer Space中的,因此这里就是简单地将在当前ART运行时线程TLAB分配过的对象和内存数据汇总到Bump Pointer Space中去即可,这包括在当前ART运行时线程TLAB分配过的对象数和内存字数。最后调用Thread类的成员函数SetTlab将当前ART运行时线程的TLAB清空,就可以完成撤销工作了。
BumpPointerSpace类的成员函数AllocBlock的实现如下所示:
byte* BumpPointerSpace::AllocBlock(size_t bytes) {
bytes = RoundUp(bytes, kAlignment);
if (!num_blocks_) {
UpdateMainBlock();
}
byte* storage = reinterpret_cast<byte*>(
AllocNonvirtualWithoutAccounting(bytes + sizeof(BlockHeader)));
if (LIKELY(storage != nullptr)) {
BlockHeader* header = reinterpret_cast<BlockHeader*>(storage);
header->size_ = bytes; // Write out the block header.
storage += sizeof(BlockHeader);
++num_blocks_;
}
return storage;
}这个函数定义在文件art/runtime/gc/space/bump_pointer_space.cc中。
Bump Pointer Space支持按块和按对象分配内存的方式。其中,按块分配的内存主要就是用来作ART运行时线程的TLAB的。分配出来的内存块有一个额外的BlockHeader,它主要是用来记录块的大小。
BumpPointerSpace类的成员变量num_blocks_记录了Bump Pointer Space已经分配了多少块内存作为当前ART运行时线程的TLAB。当它的值等于0的时候,就意味着还没有分配过内存块作为ART运行时线程的TLAB。这时候首先是调用BumpPointerSpace类的成员函数UpdateMainBlock记录一下当前已经分配的对象占用的内存大小。实际上就是将最开始那块以对角为单位分配的内存作为Bump Pointer Space的Main Block。这是一个特殊的Block,因为它没有通过额外的BlockHeader来描述。
BumpPointerSpace类的成员函数UpdateMainBlock的实现如下所示:
void BumpPointerSpace::UpdateMainBlock() {
DCHECK_EQ(num_blocks_, 0U);
main_block_size_ = Size();
}这个函数定义在文件art/runtime/gc/space/bump_pointer_space.cc中。
从这里我们就可以看到,BumpPointerSpace类的成员函数UpdateMainBlock主要是将Main Block的大小记录在成员变量main_block_size_中。注意,BumpPointerSpace类的成员函数Size是从父类ContinuousSpace继承下来的,它的职责就是返回当前已经分配出去的内存总数。
回到前面BumpPointerSpace类的成员函数AllocBlock中,接下来就会调用成员函数AllocNonvirtualWithoutAccounting执行分配内存块的操作,它的实现如下所示:
inline mirror::Object* BumpPointerSpace::AllocNonvirtualWithoutAccounting(size_t num_bytes) {
DCHECK(IsAligned<kAlignment>(num_bytes));
byte* old_end;
byte* new_end;
do {
old_end = end_.LoadRelaxed();
new_end = old_end + num_bytes;
// If there is no more room in the region, we are out of memory.
if (UNLIKELY(new_end > growth_end_)) {
return nullptr;
}
} while (!end_.CompareExchangeWeakSequentiallyConsistent(old_end, new_end));
return reinterpret_cast<mirror::Object*>(old_end);
}这个函数定义在文件art/runtime/gc/space/bump_pointer_space-inl.h中。
Bump Pointer Space当前已经分配出去的内存记录在BumpPointerSpace类的成员变量end_中。只要分配大小为num_bytes的内存块之后,不会超过当前Bump Pointer Space的限制,那么将BumpPointerSpace类的成员变量end移动到分配的块内存的末尾即可。这里通过一个while循环来修改BumpPointerSpace类的成员变量end,是因为这里采用了一个非加锁模式的多线程并发访问资源方案。
回到BumpPointerSpace类的成员函数AllocNewTlab中,当成功分配到新的内存块之后,接下来就可以调用Thread类的成员函数SetTlab为当前ART运行时线程设置新的TLAB了,它的实现如下所示:
void Thread::SetTlab(byte* start, byte* end) {
DCHECK_LE(start, end);
tlsPtr_.thread_local_start = start;
tlsPtr_.thread_local_pos = tlsPtr_.thread_local_start;
tlsPtr_.thread_local_end = end;
tlsPtr_.thread_local_objects = 0;
}这个函数定义在文件/art/runtime/thread.cc中。
Thread类的成员成变量tlsPtr_指向的是一个线程局部储存。这个线程局总储存通过一个tls_ptr_sized_values结构体来描述。在这个tls_ptr_sized_values结构体中,成员变量thread_local_start和thread_local_end记录了TLAB的起始地址和结束地址,另外两个成员变量thread_local_pos和thread_local_objects分别用来记录在当前ART运行时线程的TLAB中下一个要分配的对象的起始地址和已经在ART运行时线程的TLAB中分配出去的对象的个数。
至此,我们就分析完成了BumpPointerSpace类的成员函数AllocNewTlab为当前ART运行时线程分配一块TLAB的子过程,接下来再看第二个子过程,即Thread类的成员函数AllocTlab的实现,如下所示:
inline mirror::Object* Thread::AllocTlab(size_t bytes) {
DCHECK_GE(TlabSize(), bytes);
++tlsPtr_.thread_local_objects;
mirror::Object* ret = reinterpret_cast<mirror::Object*>(tlsPtr_.thread_local_pos);
tlsPtr_.thread_local_pos += bytes;
return ret;
}这个函数定义在文件/art/runtime/thread-inl.h中。
在当前ART运行时线程的TLAB中分配对象的过程很简单,主要将用来当前ART运行时线程的线程局部储存的一个tls_ptr_sized_values结构体的成员变量thread_local_pos向前移动参数bytes指定的大小,并且将成员变量thread_local_objects增加1即可,同时将原来成员变量thread_local_pos描述的地址值返回给调用者,作为新分配对象的起始地址。
这样我们就分析完成了在ART运行时线程的TLAB分配对象的过程,接下来我们继续分析BumpPointerSpace类的成员函数AllocNonvirtual的实现,以便可以了解在Bump Pointer Space分配一个普通对象的过程,它的实现如下所示:
inline mirror::Object* BumpPointerSpace::AllocNonvirtual(size_t num_bytes) {
mirror::Object* ret = AllocNonvirtualWithoutAccounting(num_bytes);
if (ret != nullptr) {
objects_allocated_.FetchAndAddSequentiallyConsistent(1);
bytes_allocated_.FetchAndAddSequentiallyConsistent(num_bytes);
}
return ret;
}这个函数定义在文件art/runtime/gc/space/bump_pointer_space-inl.h中。
BumpPointerSpace类的成员函数AllocNonvirtual通过调用我们前面已经分析过的成员函数AllocNonvirtualWithoutAccounting来在Bump Pointer Space中分配一块指定大小的内存,然后再增加Bump Pointer Space已经分配对象数和内存字节数即可。
从上面的分析过程就可以清楚地看到在Bump Pointer Space中分配对象的过程是非常简单的,它只需要将下一个要分配的内存块的地址不断地向前推进即可。
接下来我们再看在Ros Alloc Space中分配对象的过程,即RosAllocSpace类的成员函数AllocNonvirtual的实现,如下所示:
class RosAllocSpace : public MallocSpace {
public:
......
mirror::Object* AllocNonvirtual(Thread* self, size_t num_bytes, size_t* bytes_allocated,
size_t* usable_size) {
// RosAlloc zeroes memory internally.
return AllocCommon(self, num_bytes, bytes_allocated, usable_size);
}
......
};这个函数定义在文件art/runtime/gc/space/bump_pointer_space.h中。
RosAllocSpace类的成员函数AllocNonvirtual通过调用另外一个成员函数AllocCommon来分配指定大小的内存,后者的实现如下所示:
template<bool kThreadSafe>
inline mirror::Object* RosAllocSpace::AllocCommon(Thread* self, size_t num_bytes,
size_t* bytes_allocated, size_t* usable_size) {
size_t rosalloc_size = 0;
if (!kThreadSafe) {
Locks::mutator_lock_->AssertExclusiveHeld(self);
}
mirror::Object* result = reinterpret_cast<mirror::Object*>(
rosalloc_->Alloc<kThreadSafe>(self, num_bytes, &rosalloc_size));
if (LIKELY(result != NULL)) {
......
*bytes_allocated = rosalloc_size;
......
if (usable_size != nullptr) {
*usable_size = rosalloc_size;
}
}
return result;
}这个函数定义在文件art/runtime/gc/space/bump_pointer_space-inl.h中。
RosAllocSpace类的成员变量rosalloc_指向的是一个RosAlloc对象。这个RosAlloc对象负责了Ros Alloc Space底层的内存管理。因此,这里就调用了RosAlloc类的成员函数Alloc来执行具体的内存分配工作。
RosAlloc类的成员函数Alloc的实现如下所示:
template<bool kThreadSafe>
inline ALWAYS_INLINE void* RosAlloc::Alloc(Thread* self, size_t size, size_t* bytes_allocated) {
if (UNLIKELY(size > kLargeSizeThreshold)) {
return AllocLargeObject(self, size, bytes_allocated);
}
void* m;
if (kThreadSafe) {
m = AllocFromRun(self, size, bytes_allocated);
} else {
m = AllocFromRunThreadUnsafe(self, size, bytes_allocated);
}
// Check if the returned memory is really all zero.
if (kCheckZeroMemory && m != nullptr) {
byte* bytes = reinterpret_cast<byte*>(m);
for (size_t i = 0; i < size; ++i) {
DCHECK_EQ(bytes[i], 0);
}
}
return m;
}这个函数定义在文件art/runtime/gc/allocator/rosalloc-inl.h中。
如果指定分配的大小size大于常量kLargeSizeThreshold的值,那么就会调用成员函数AllocLargeObject按页进行分配。否则的话,取决于模板参数kThreadSafe的值,也就是当前执行路径是否是线程安全的。如果是线程安全的,就调用成员函数AllocFromRun进行分配。否则的话,就调用成员函数AllocFromRunThreadUnsafe进行分配。两者的逻辑是基本相同的,区别就在于后者要求在获取堆锁的前提下进行。
常量kLargeSizeThreshold的值定义为2048,这意味着大于2KB的内存分配请求都是按页进行分配的。接下来,我们首先分析RosAlloc类的成员函数AllocLargeObject的实现,然后再分析RosAlloc类的成员函数AllocFromRun的实现,以便可以了解RosAlloc是如何管理内存的。
RosAlloc类的成员函数AllocLargeObject的实现如下所示:
void* RosAlloc::AllocLargeObject(Thread* self, size_t size, size_t* bytes_allocated) {
......
size_t num_pages = RoundUp(size, kPageSize) / kPageSize;
void* r;
{
MutexLock mu(self, lock_);
r = AllocPages(self, num_pages, kPageMapLargeObject);
}
......
const size_t total_bytes = num_pages * kPageSize;
*bytes_allocated = total_bytes;
......
return r;
}这个函数定义在文件art/runtime/gc/allocator/rosalloc.cc中。
RosAlloc类的成员函数AllocLargeObject首先是将请求分配的内存字节数对齐到页大小,然后再计算得到要分配的页数num_pages,最后调用另外一个成员函数AllocPages进行分配。
RosAlloc类的成员函数AllocPages的定义比较长,我们分段来阅读。
第一段代码是在一个Free Page Run列表中检查是否有合适的FreePageRun用来分配,如下所示:
void* RosAlloc::AllocPages(Thread* self, size_t num_pages, byte page_map_type) {
lock_.AssertHeld(self);
......
FreePageRun* res = NULL;
const size_t req_byte_size = num_pages * kPageSize;
// Find the lowest address free page run that's large enough.
for (auto it = free_page_runs_.begin(); it != free_page_runs_.end(); ) {
FreePageRun* fpr = *it;
......
size_t fpr_byte_size = fpr->ByteSize(this);
......
if (req_byte_size <= fpr_byte_size) {
// Found one.
free_page_runs_.erase(it++);
......
if (req_byte_size < fpr_byte_size) {
// Split.
FreePageRun* remainder = reinterpret_cast<FreePageRun*>(reinterpret_cast<byte*>(fpr) + req_byte_size);
......
remainder->SetByteSize(this, fpr_byte_size - req_byte_size);
......
// Don't need to call madvise on remainder here.
free_page_runs_.insert(remainder);
......
fpr->SetByteSize(this, req_byte_size);
......
}
res = fpr;
break;
} else {
++it;
}
}这个代码片断定义在art/runtime/gc/allocator/rosalloc.cc中。
RosAlloc类每次释放按页分配的内存时,都是将它们放入到成员变量free_page_runs_描述的一个空闲页列表中,以便以后可以复用。
这段代码的逻辑很简单,它就是从头开始遍历成员变量free_page_runs_描述的空闲页列表。如果中间找到一个Free Page Run,它的大小fpr_byte_size大于等于请求分配的大小req_byte_size,就停止遍历。在大于的情况下,还需要将该Free Page Run的剩余大小封装成另外一个Free Page Run,并且添加到成员变量free_page_runs_描述的空闲页列表中去。
第二段代码是解决第一段代码没有在Free Page Run列表中找到合适的Free Page Run的情况,如下所示:
// Failed to allocate pages. Grow the footprint, if possible.
if (UNLIKELY(res == NULL && capacity_ > footprint_)) {
FreePageRun* last_free_page_run = NULL;
size_t last_free_page_run_size;
auto it = free_page_runs_.rbegin();
if (it != free_page_runs_.rend() && (last_free_page_run = *it)->End(this) == base_ + footprint_) {
// There is a free page run at the end.
......
last_free_page_run_size = last_free_page_run->ByteSize(this);
} else {
// There is no free page run at the end.
last_free_page_run_size = 0;
}
......
if (capacity_ - footprint_ + last_free_page_run_size >= req_byte_size) {
// If we grow the heap, we can allocate it.
size_t increment = std::min(std::max(2 * MB, req_byte_size - last_free_page_run_size),
capacity_ - footprint_);
......
size_t new_footprint = footprint_ + increment;
size_t new_num_of_pages = new_footprint / kPageSize;
......
page_map_size_ = new_num_of_pages;
......
free_page_run_size_map_.resize(new_num_of_pages);
art_heap_rosalloc_morecore(this, increment);
if (last_free_page_run_size > 0) {
// There was a free page run at the end. Expand its size.
......
last_free_page_run->SetByteSize(this, last_free_page_run_size + increment);
......
} else {
// Otherwise, insert a new free page run at the end.
FreePageRun* new_free_page_run = reinterpret_cast<FreePageRun*>(base_ + footprint_);
......
new_free_page_run->SetByteSize(this, increment);
......
free_page_runs_.insert(new_free_page_run);
......
}
......
footprint_ = new_footprint;
// And retry the last free page run.
it = free_page_runs_.rbegin();
......
FreePageRun* fpr = *it;
......
size_t fpr_byte_size = fpr->ByteSize(this);
......
free_page_runs_.erase(fpr);
......
if (req_byte_size < fpr_byte_size) {
// Split if there's a remainder.
FreePageRun* remainder = reinterpret_cast<FreePageRun*>(reinterpret_cast<byte*>(fpr) + req_byte_size);
......
remainder->SetByteSize(this, fpr_byte_size - req_byte_size);
......
free_page_runs_.insert(remainder);
......
fpr->SetByteSize(this, req_byte_size);
......
}
res = fpr;
}
}
这个代码片断定义在art/runtime/gc/allocator/rosalloc.cc中。
如果本地变量res的值等于NULL,就表明前面没有在Free Page Run列表中找到合适的Free Page Run。在这种情况下,如果当前Ros Alloc Space底层封装的内存块的使用大小(由成员变量footprint_描述)还没有达到最大值(由成员变量capacity_描述),就尝试增长内存块的大小,以便可以满足分配请求。
由于Ros Alloc Space底层封装的内存块有可能是按页进行分配的,也有可能是按对象大小进行分配的,因此内存块的最后一个分配单位有可能是若干个页,也可能是一个对象。在前一种情况下,如果这若干个页恰好就是Free Page Run列表中的最后一个Free Page Run,那么就选择增加该Free Page Run的大小。否则的话,就选择创建另外一个新的Free Page Run,并且添加到Free Page Run列表中去。
完成上面的操作之后,我们就可以保证Free Page Run列表的最后一个Free Page Run是一定能够满足分配请求的。这时候就对它执行第一段代码类似的逻辑,即在最后一个Free Page Run的大小大于请求分配大小的情况下,对其进行分割,并且将分割出来的剩余大小封装成另外一个Free Page Run添加Free Page Run列表中去。
第三段代码执行收尾操作,如下所示:
if (LIKELY(res != NULL)) {
// Update the page map.
size_t page_map_idx = ToPageMapIndex(res);
......
switch (page_map_type) {
case kPageMapRun:
page_map_[page_map_idx] = kPageMapRun;
for (size_t i = 1; i < num_pages; i++) {
page_map_[page_map_idx + i] = kPageMapRunPart;
}
break;
case kPageMapLargeObject:
page_map_[page_map_idx] = kPageMapLargeObject;
for (size_t i = 1; i < num_pages; i++) {
page_map_[page_map_idx + i] = kPageMapLargeObjectPart;
}
break;
default:
LOG(FATAL) << "Unreachable - page map type: " << page_map_type;
break;
}
......
return res;
}
......
return nullptr;
}这个代码片断定义在art/runtime/gc/allocator/rosalloc.cc中。
RosAlloc类有一个page_map_数组,用来记录已经使用的每一个页的类型,就是记录它们是按页分配使用的,还是按对象分配使用的,这是由参数page_map_type决定的。对于按页使用分配出去的页块,第一个页的类型记录为kPageMapLargeObject,其余页记录为kPageMapLargeObjectPart。对于按对象使用分配出去的页块,第一个页的类型记录为kPageMapRun,其余页记录为kPageMapRunPart。
当然,设置page_map_数组是在能成功找到一个合适的Free Page Run的情况下进行的。如果没有找到合适的Free Page Run,就直接返回一个nullptr给调用者,表示分配失败了。
以上就是RosAlloc类按页分配内存的过程,接下来我们继续看按对象分配内存的过程,即RosAlloc类的成员函数AllocFromRun的实现,如下所示:
void* RosAlloc::AllocFromRun(Thread* self, size_t size, size_t* bytes_allocated) {
......
size_t bracket_size;
size_t idx = SizeToIndexAndBracketSize(size, &bracket_size);
......
void* slot_addr;
if (LIKELY(idx < kNumThreadLocalSizeBrackets)) {
// Use a thread-local run.
Run* thread_local_run = reinterpret_cast<Run*>(self->GetRosAllocRun(idx));
......
slot_addr = thread_local_run->AllocSlot();
......
if (UNLIKELY(slot_addr == nullptr)) {
// The run got full. Try to free slots.
......
MutexLock mu(self, *size_bracket_locks_[idx]);
bool is_all_free_after_merge;
// This is safe to do for the dedicated_full_run_ since the bitmaps are empty.
if (thread_local_run->MergeThreadLocalFreeBitMapToAllocBitMap(&is_all_free_after_merge)) {
......
} else {
// No slots got freed. Try to refill the thread-local run.
......
if (thread_local_run != dedicated_full_run_) {
thread_local_run->SetIsThreadLocal(false);
......
}
thread_local_run = RefillRun(self, idx);
if (UNLIKELY(thread_local_run == nullptr)) {
self->SetRosAllocRun(idx, dedicated_full_run_);
return nullptr;
}
......
thread_local_run->SetIsThreadLocal(true);
self->SetRosAllocRun(idx, thread_local_run);
......
}
......
slot_addr = thread_local_run->AllocSlot();
......
}
......
} else {
// Use the (shared) current run.
MutexLock mu(self, *size_bracket_locks_[idx]);
slot_addr = AllocFromCurrentRunUnlocked(self, idx);
......
}
......
*bytes_allocated = bracket_size;
// Caller verifies that it is all 0.
return slot_addr;
}这个函数定义在文件art/runtime/gc/allocator/rosalloc.cc中。
RosAllocSpace对内存的管理与BumpPointerSpace对内存的管理有点类似,它们都是会将自己的一部分内存当作ART运行时线程的TLAB使用。因此,RosAlloc类的成员函数AllocFromRun就会先考虑是否要在当前ART运行时线程的局部Run进行分配。当请求分配的内存小于常量kNumThreadLocalSizeBrackets描述的值的时候,RosAlloc类的成员函数AllocFromRun就会在当前ART运行时线程的局部Run进行分配。否则的话,再在所有ART运行时线程共享的Run进行分配。
常量kNumThreadLocalSizeBrackets的值定义在11,根据我们在前面ART运行时Compacting GC简要介绍和学习计划一文对Runs-of-slots算法的描述,这个值对应的内存大小即为176。这就意味着小于176字节的分配请求都在当前ART运行时线程的局部Run进行分配。注意,请求分配的大小已经转换为Run Index,即变量idx的值,因此,这里比较的是Run Index的大小,而不是直接的内存大小,不过效果是一样的。
当决定在当前ART运行时线程的局部Run进行分配的情况下,首先要做的就是获得当前ART运行时线程的Index值等于idx的局部Run,这可以通过参数self指向的一个Thread对象的成员函数GetRosAllocRun来获得。
获得了当前ART运行时线程的Index值等于idx的局部Run之后,就可以调用它的成员函数AllocSlot进行分配了。如果分配失败,也就是该Run已经没有空闲的Slot可用,就需要进一步处理。在前面ART运行时Compacting GC简要介绍和学习计划一文中,我们提到,每一个Run都有一个thread local bit map,它的作用是在释放对象时,对应的Slot不会马上就释放,而是先Hold住,但是会在thread local bit map记录它是以后需要释放掉的。这样当一个Run无法成功分配到Slot时,才会对那些需要释放但是又还没有释放的Slot进行处理,实际上就是合并thread local bit map的信息到alloc bit map中去,这是通过调用Run类的成员函数MergeThreadLocalFreeBitMapToAllocBitMap来完成的。通过这种方式,就可以达到批量方式释放空闲Slot的目的。
但是也有可能出现这样的一种情况,一个Run既没有空闲的Slot可用,而且也没有该释放又还没有释放的Slot。在这种情况下,调用Run类的成员函数MergeThreadLocalFreeBitMapToAllocBitMap就会返回false。这时候就需要给当前ART运行时线程增加一个Index值等于idx的局部Run。这个Run可以通过调用RosAlloc类的成员函数RefillRun来进行分配。
如果调用RosAlloc类的成员函数RefillRun成功分配到一个Run,那么就将该Run设置为当前ART运行时线程的局部Run,这是通过调用参数self指向的一个Thread对象的成员函数SetRosAllocRun来进行的。同时也会调用该Run的成员函数AllocSlot分配一个Slot,这时候就能够保证是成功分配到的。
另一个方面,如果调用RosAlloc类的成员函数RefillRun不能成功分配到一个Run,这时候请求分配的内存就失败了。在返回一个nullptr给调用者之前,RosAlloc类的成员函数AllocFromRun会做一个代码优化,那就是将一个永远是full状态的并且是在所有ART运行时线程之间共享的Run设置为当前ART运行时线程的Index值为idx的局部Run。
这个永远是full状态的并且是在所有ART运行时线程之间共享的Run保存在RosAlloc类的成员变量dedicated_full_run_中。由于它的状态永远为full,因而就不能从中分配到Slot,它起到的作用就是使得我们总是可以从当前的ART运行时线程中获得一个不为nullptr值的局部Run,这样就可以在代码里面省去一些空指针判断逻辑。
以上就是在当前ART运行时线程局部Run中分配内存的过程,接下来我们继续分析在所有ART运行时线程共享的Run中分配内存的过程,即RosAlloc类的成员函数AllocFromCurrentRunUnlocked的实现,如下所示:
inline void* RosAlloc::AllocFromCurrentRunUnlocked(Thread* self, size_t idx) {
Run* current_run = current_runs_[idx];
......
void* slot_addr = current_run->AllocSlot();
if (UNLIKELY(slot_addr == nullptr)) {
// The current run got full. Try to refill it.
......
current_run = RefillRun(self, idx);
if (UNLIKELY(current_run == nullptr)) {
// Failed to allocate a new run, make sure that it is the dedicated full run.
current_runs_[idx] = dedicated_full_run_;
return nullptr;
}
......
current_run->SetIsThreadLocal(false);
current_runs_[idx] = current_run;
......
slot_addr = current_run->AllocSlot();
......
}
return slot_addr;
}这个函数定义在文件art/runtime/gc/allocator/rosalloc.cc中。
RosAlloc类的成员变量currents_runs_描述的就是所有的ART运行时线程都共享的Run,通过参数idx就可以获得要在其中分配Slot的Run。获得了这个Run之后,就可以调用它的成员函数AllocSlot进行内存分配。
在分配失败的情况下,处理方式与前面在当前的ART运行时线程的局部Run中分配失败Slot的逻辑类似,都是会尝试调用RosAlloc类的成员函数RefillRun重新分配另外一个Index值为idx的Run,然后再从该Run分配Slot。如果不能重新分配到一个Index值为idx的Run,那么就会将currents_runs_数组中索引值等于idx的Run设置为dedicated_fullrun,也是为了减少代码里的空指针判断逻辑。
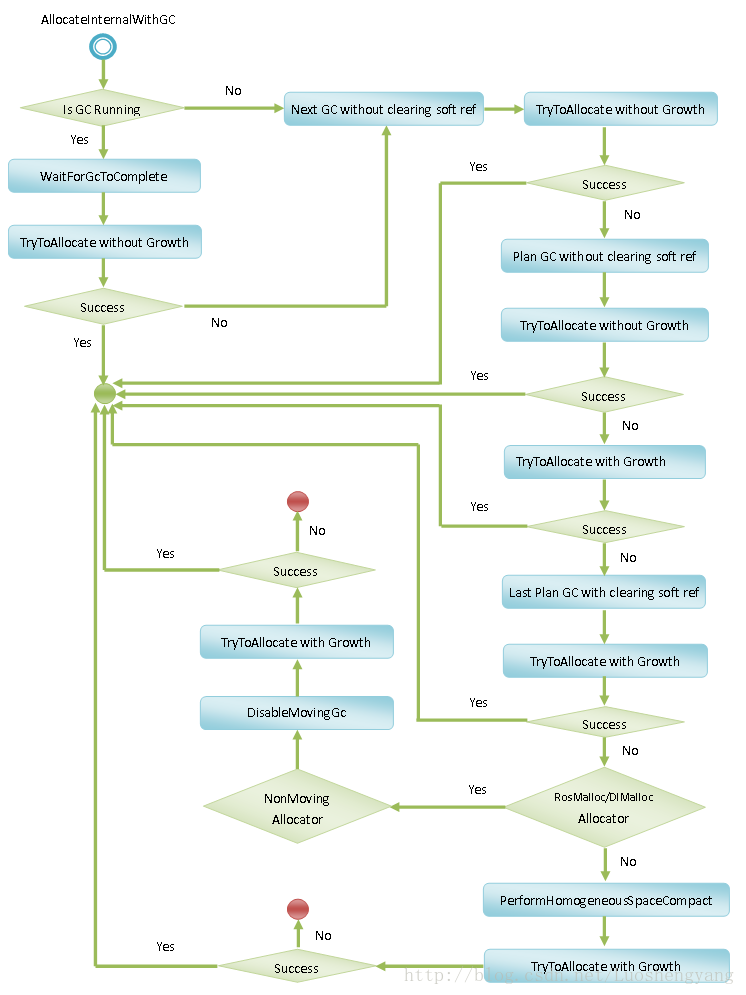
至此,在Ros Alloc Space中分配对象的过程就分要完成了,Heap类的成员函数TryToAllocate的实现也分析完成了,回到Heap类的成员函数AllocObjectWithAllocator中,我们最后需要分析的一个函数是Heap类的成员函数AllocateInternalWithGc,也就是带GC的对象分配过程,如图4所示:
图4 AllocateInternalWithGc分配对象过程
接下来我们就结合Heap类的成员函数AllocateInternalWithGc的源码来分析图4涉及到逻辑。由于Heap类的成员函数AllocateInternalWithGc的实现也是比较长,我们分段来阅读。
第一段代码是检查ART运行时当前是否正在执行GC。如果是的话,就等待当前GC完成之后,再尝试进行对象分配,如下所示:
mirror::Object* Heap::AllocateInternalWithGc(Thread* self, AllocatorType allocator,
size_t alloc_size, size_t* bytes_allocated,
size_t* usable_size,
mirror::Class** klass) {
bool was_default_allocator = allocator == GetCurrentAllocator();
......
collector::GcType last_gc = WaitForGcToComplete(kGcCauseForAlloc, self);
if (last_gc != collector::kGcTypeNone) {
// If we were the default allocator but the allocator changed while we were suspended,
// abort the allocation.
if (was_default_allocator && allocator != GetCurrentAllocator()) {
return nullptr;
}
// A GC was in progress and we blocked, retry allocation now that memory has been freed.
mirror::Object* ptr = TryToAllocate<true, false>(self, allocator, alloc_size, bytes_allocated,
usable_size);
if (ptr != nullptr) {
return ptr;
}
}这个代码片段定义在文件art/runtime/gc/heap.cc中。
首先是调用Heap类的成员函数WaitForGcToComplete检查当前是否有GC正在执行。如果有的话,就等待它执行完成。Heap类的成员函数WaitForGcToComplete的返回值last_gc不等于collector::kGcTypeNone时,就表明刚才有GC正在执行。在这种情况下,就可以调用我们前面分析过的Heap类的成员函数TryToAllocate尝试进行一次内存分配操作了。如果分配成功,就不用再往前执行。不过如果刚才的GC执行完成之后,ART运行时当前使用的分配器发生了变化,那么就不能再继续执行内存分配的操作了。这是由于ART运行时当前使用的分配器发生了变化,意味着参数allocator指定的分配器就不再合适使用。这种情况是有可能的,例如刚才的GC是由GC切换而发生的,这时候就会导致ART运行时当前使用的分配器发生变化。
第二段代码尝试执行一次GC后,再调用Heap类的成员函数TryToAllocate执行一次内存分配操作,如下所示:
collector::GcType tried_type = next_gc_type_;
const bool gc_ran =
CollectGarbageInternal(tried_type, kGcCauseForAlloc, false) != collector::kGcTypeNone;
if (was_default_allocator && allocator != GetCurrentAllocator()) {
return nullptr;
}
if (gc_ran) {
mirror::Object* ptr = TryToAllocate<true, false>(self, allocator, alloc_size, bytes_allocated,
usable_size);
if (ptr != nullptr) {
return ptr;
}
}这个代码片段定义在文件art/runtime/gc/heap.cc中。
这次执行的GC类型由Heap类的成员变量next_gc_type_决定。Heap类的成员变量next_gc_type_的值初始化为collector::kGcTypePartial,取值范围为collector::kGcTypeSticky、collector::kGcTypePartial或者collector::kGcTypeFull。
如果上一次执行的GC类型不是collector::kGcTypeSticky,那么下一次执行的GC类型就为collector::kGcTypePartial或者collector::kGcTypeFull,取决于Zygote Space是否已经创建。如果已经创建,那么下一次执行的GC类型就为collector::kGcTypePartial;否则的话,就为collector::kGcTypeFull。
如果上一次执行的GC类型为collector::kGcTypeSticky,那么就取决于上一次执行的collector::kGcTypeSticky GC的垃圾回收速度,决定下一次执行的GC类型。如果上一次执行的collector::kGcTypeSticky GC的垃圾回收速度大于之前执行过的非collector::kGcTypeSticky GC的平均垃圾回收速度,并且当前分配的内存�
京东创始人刘强东和其妻子章泽天最近成为了互联网舆论关注的焦点。有关他们“移民美国”和在美国购买豪宅的传言在互联网上广泛传播。然而,京东官方通过微博发言人发布的消息澄清了这些传言,称这些言论纯属虚假信息和蓄意捏造。
日前,据博主“@超能数码君老周”爆料,国内三大运营商中国移动、中国电信和中国联通预计将集体采购百万台规模的华为Mate60系列手机。
据报道,荷兰半导体设备公司ASML正看到美国对华遏制政策的负面影响。阿斯麦(ASML)CEO彼得·温宁克在一档电视节目中分享了他对中国大陆问题以及该公司面临的出口管制和保护主义的看法。彼得曾在多个场合表达了他对出口管制以及中荷经济关系的担忧。
今年早些时候,抖音悄然上线了一款名为“青桃”的 App,Slogan 为“看见你的热爱”,根据应用介绍可知,“青桃”是一个属于年轻人的兴趣知识视频平台,由抖音官方出品的中长视频关联版本,整体风格有些类似B站。
日前,威马汽车首席数据官梅松林转发了一份“世界各国地区拥车率排行榜”,同时,他发文表示:中国汽车普及率低于非洲国家尼日利亚,每百户家庭仅17户有车。意大利世界排名第一,每十户中九户有车。
近日,一项新的研究发现,维生素 C 和 E 等抗氧化剂会激活一种机制,刺激癌症肿瘤中新血管的生长,帮助它们生长和扩散。
据媒体援引消息人士报道,苹果公司正在测试使用3D打印技术来生产其智能手表的钢质底盘。消息传出后,3D系统一度大涨超10%,不过截至周三收盘,该股涨幅回落至2%以内。
9月2日,坐拥千万粉丝的网红主播“秀才”账号被封禁,在社交媒体平台上引发热议。平台相关负责人表示,“秀才”账号违反平台相关规定,已封禁。据知情人士透露,秀才近期被举报存在违法行为,这可能是他被封禁的部分原因。据悉,“秀才”年龄39岁,是安徽省亳州市蒙城县人,抖音网红,粉丝数量超1200万。他曾被称为“中老年...
9月3日消息,亚马逊的一些股东,包括持有该公司股票的一家养老基金,日前对亚马逊、其创始人贝索斯和其董事会提起诉讼,指控他们在为 Project Kuiper 卫星星座项目购买发射服务时“违反了信义义务”。
据消息,为推广自家应用,苹果现推出了一个名为“Apps by Apple”的网站,展示了苹果为旗下产品(如 iPhone、iPad、Apple Watch、Mac 和 Apple TV)开发的各种应用程序。
特斯拉本周在美国大幅下调Model S和X售价,引发了该公司一些最坚定支持者的不满。知名特斯拉多头、未来基金(Future Fund)管理合伙人加里·布莱克发帖称,降价是一种“短期麻醉剂”,会让潜在客户等待进一步降价。
据外媒9月2日报道,荷兰半导体设备制造商阿斯麦称,尽管荷兰政府颁布的半导体设备出口管制新规9月正式生效,但该公司已获得在2023年底以前向中国运送受限制芯片制造机器的许可。
近日,根据美国证券交易委员会的文件显示,苹果卫星服务提供商 Globalstar 近期向马斯克旗下的 SpaceX 支付 6400 万美元(约 4.65 亿元人民币)。用于在 2023-2025 年期间,发射卫星,进一步扩展苹果 iPhone 系列的 SOS 卫星服务。
据报道,马斯克旗下社交平台𝕏(推特)日前调整了隐私政策,允许 𝕏 使用用户发布的信息来训练其人工智能(AI)模型。新的隐私政策将于 9 月 29 日生效。新政策规定,𝕏可能会使用所收集到的平台信息和公开可用的信息,来帮助训练 𝕏 的机器学习或人工智能模型。
9月2日,荣耀CEO赵明在采访中谈及华为手机回归时表示,替老同事们高兴,觉得手机行业,由于华为的回归,让竞争充满了更多的可能性和更多的魅力,对行业来说也是件好事。
《自然》30日发表的一篇论文报道了一个名为Swift的人工智能(AI)系统,该系统驾驶无人机的能力可在真实世界中一对一冠军赛里战胜人类对手。
近日,非营利组织纽约真菌学会(NYMS)发出警告,表示亚马逊为代表的电商平台上,充斥着各种AI生成的蘑菇觅食科普书籍,其中存在诸多错误。
社交媒体平台𝕏(原推特)新隐私政策提到:“在您同意的情况下,我们可能出于安全、安保和身份识别目的收集和使用您的生物识别信息。”
2023年德国柏林消费电子展上,各大企业都带来了最新的理念和产品,而高端化、本土化的中国产品正在不断吸引欧洲等国际市场的目光。
罗永浩日前在直播中吐槽苹果即将推出的 iPhone 新品,具体内容为:“以我对我‘子公司’的了解,我认为 iPhone 15 跟 iPhone 14 不会有什么区别的,除了序(列)号变了,这个‘不要脸’的东西,这个‘臭厨子’。