在前面一篇文章浅谈Android系统进程间通信(IPC)机制Binder中的Server和Client获得Service Manager接口之路中,介绍了在Android系统中Binder进程间通信机制中的Server角色是如何获得Service Manager远程接口的,即defaultServiceManager函数的实现。Server获得了Service Manager远程接口之后,就要把自己的Service添加到Service Manager中去,然后把自己启动起来,等待Client的请求。本文将通过分析源代码了解Server的启动过程是怎么样的。
本文通过一个具体的例子来说明Binder机制中Server的启动过程。我们知道,在Android系统中,提供了多媒体播放的功能,这个功能是以服务的形式来提供的。这里,我们就通过分析MediaPlayerService的实现来了解Media Server的启动过程。
首先,看一下MediaPlayerService的类图,以便我们理解下面要描述的内容。
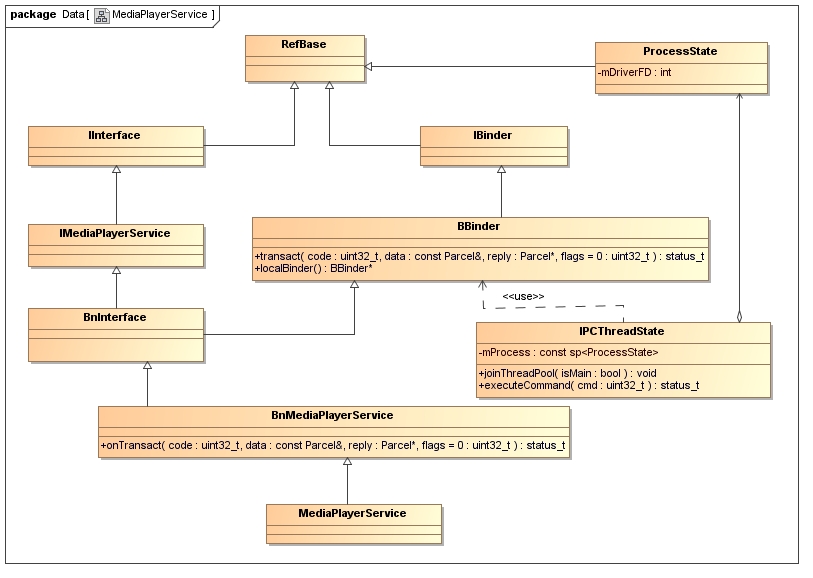
我们将要介绍的主角MediaPlayerService继承于BnMediaPlayerService类,熟悉Binder机制的同学应该知道BnMediaPlayerService是一个Binder Native类,用来处理Client请求的。BnMediaPlayerService继承于BnInterface
template<typename INTERFACE>
class BnInterface : public INTERFACE, public BBinder
{
public:
virtual sp<IInterface> queryLocalInterface(const String16& _descriptor);
virtual const String16& getInterfaceDescriptor() const;
protected:
virtual IBinder* onAsBinder();
};这里可以看出,BnMediaPlayerService实际是继承了IMediaPlayerService和BBinder类。IMediaPlayerService和BBinder类又分别继承了IInterface和IBinder类,IInterface和IBinder类又同时继承了RefBase类。
实际上,BnMediaPlayerService并不是直接接收到Client处发送过来的请求,而是使用了IPCThreadState接收Client处发送过来的请求,而IPCThreadState又借助了ProcessState类来与Binder驱动程序交互。有关IPCThreadState和ProcessState的关系,可以参考上一篇文章浅谈Android系统进程间通信(IPC)机制Binder中的Server和Client获得Service Manager接口之路,接下来也会有相应的描述。IPCThreadState接收到了Client处的请求后,就会调用BBinder类的transact函数,并传入相关参数,BBinder类的transact函数最终调用BnMediaPlayerService类的onTransact函数,于是,就开始真正地处理Client的请求了。
了解了MediaPlayerService类结构之后,就要开始进入到本文的主题了。
首先,看看MediaPlayerService是如何启动的。启动MediaPlayerService的代码位于frameworks/base/media/mediaserver/main_mediaserver.cpp文件中:
int main(int argc, char** argv)
{
sp<ProcessState> proc(ProcessState::self());
sp<IServiceManager> sm = defaultServiceManager();
LOGI("ServiceManager: %p", sm.get());
AudioFlinger::instantiate();
MediaPlayerService::instantiate();
CameraService::instantiate();
AudioPolicyService::instantiate();
ProcessState::self()->startThreadPool();
IPCThreadState::self()->joinThreadPool();
}这里我们不关注AudioFlinger和CameraService相关的代码。
先看下面这句代码:
sp<ProcessState> proc(ProcessState::self());这句代码的作用是通过ProcessState::self()调用创建一个ProcessState实例。ProcessState::self()是ProcessState类的一个静态成员变量,定义在frameworks/base/libs/binder/ProcessState.cpp文件中:
sp<ProcessState> ProcessState::self()
{
if (gProcess != NULL) return gProcess;
AutoMutex _l(gProcessMutex);
if (gProcess == NULL) gProcess = new ProcessState;
return gProcess;
}这里可以看出,这个函数作用是返回一个全局唯一的ProcessState实例gProcess。全局唯一实例变量gProcess定义在frameworks/base/libs/binder/Static.cpp文件中:
Mutex gProcessMutex;
sp<ProcessState> gProcess;再来看ProcessState的构造函数:
ProcessState::ProcessState()
: mDriverFD(open_driver())
, mVMStart(MAP_FAILED)
, mManagesContexts(false)
, mBinderContextCheckFunc(NULL)
, mBinderContextUserData(NULL)
, mThreadPoolStarted(false)
, mThreadPoolSeq(1)
{
if (mDriverFD >= 0) {
// XXX Ideally, there should be a specific define for whether we
// have mmap (or whether we could possibly have the kernel module
// availabla).
#if !defined(HAVE_WIN32_IPC)
// mmap the binder, providing a chunk of virtual address space to receive transactions.
mVMStart = mmap(0, BINDER_VM_SIZE, PROT_READ, MAP_PRIVATE | MAP_NORESERVE, mDriverFD, 0);
if (mVMStart == MAP_FAILED) {
// *sigh*
LOGE("Using /dev/binder failed: unable to mmap transaction memory.\n");
close(mDriverFD);
mDriverFD = -1;
}
#else
mDriverFD = -1;
#endif
}
if (mDriverFD < 0) {
// Need to run without the driver, starting our own thread pool.
}
}这个函数有两个关键地方,一是通过open_driver函数打开Binder设备文件/dev/binder,并将打开设备文件描述符保存在成员变量mDriverFD中;二是通过mmap来把设备文件/dev/binder映射到内存中。
先看open_driver函数的实现,这个函数同样位于frameworks/base/libs/binder/ProcessState.cpp文件中:
static int open_driver()
{
if (gSingleProcess) {
return -1;
}
int fd = open("/dev/binder", O_RDWR);
if (fd >= 0) {
fcntl(fd, F_SETFD, FD_CLOEXEC);
int vers;
#if defined(HAVE_ANDROID_OS)
status_t result = ioctl(fd, BINDER_VERSION, &vers);
#else
status_t result = -1;
errno = EPERM;
#endif
if (result == -1) {
LOGE("Binder ioctl to obtain version failed: %s", strerror(errno));
close(fd);
fd = -1;
}
if (result != 0 || vers != BINDER_CURRENT_PROTOCOL_VERSION) {
LOGE("Binder driver protocol does not match user space protocol!");
close(fd);
fd = -1;
}
#if defined(HAVE_ANDROID_OS)
size_t maxThreads = 15;
result = ioctl(fd, BINDER_SET_MAX_THREADS, &maxThreads);
if (result == -1) {
LOGE("Binder ioctl to set max threads failed: %s", strerror(errno));
}
#endif
} else {
LOGW("Opening '/dev/binder' failed: %s\n", strerror(errno));
}
return fd;
}这个函数的作用主要是通过open文件操作函数来打开/dev/binder设备文件,然后再调用ioctl文件控制函数来分别执行BINDER_VERSION和BINDER_SET_MAX_THREADS两个命令来和Binder驱动程序进行交互,前者用于获得当前Binder驱动程序的版本号,后者用于通知Binder驱动程序,MediaPlayerService最多可同时启动15个线程来处理Client端的请求。
open在Binder驱动程序中的具体实现,请参考前面一篇文章浅谈Service Manager成为Android进程间通信(IPC)机制Binder守护进程之路,这里不再重复描述。打开/dev/binder设备文件后,Binder驱动程序就为MediaPlayerService进程创建了一个struct binder_proc结构体实例来维护MediaPlayerService进程上下文相关信息。
我们来看一下ioctl文件操作函数执行BINDER_VERSION命令的过程:
status_t result = ioctl(fd, BINDER_VERSION, &vers);这个函数调用最终进入到Binder驱动程序的binder_ioctl函数中,我们只关注BINDER_VERSION相关的部分逻辑:
static long binder_ioctl(struct file *filp, unsigned int cmd, unsigned long arg)
{
int ret;
struct binder_proc *proc = filp->private_data;
struct binder_thread *thread;
unsigned int size = _IOC_SIZE(cmd);
void __user *ubuf = (void __user *)arg;
/*printk(KERN_INFO "binder_ioctl: %d:%d %x %lx\n", proc->pid, current->pid, cmd, arg);*/
ret = wait_event_interruptible(binder_user_error_wait, binder_stop_on_user_error < 2);
if (ret)
return ret;
mutex_lock(&binder_lock);
thread = binder_get_thread(proc);
if (thread == NULL) {
ret = -ENOMEM;
goto err;
}
switch (cmd) {
......
case BINDER_VERSION:
if (size != sizeof(struct binder_version)) {
ret = -EINVAL;
goto err;
}
if (put_user(BINDER_CURRENT_PROTOCOL_VERSION, &((struct binder_version *)ubuf)->protocol_version)) {
ret = -EINVAL;
goto err;
}
break;
......
}
ret = 0;
err:
......
return ret;
}很简单,只是将BINDER_CURRENT_PROTOCOL_VERSION写入到传入的参数arg指向的用户缓冲区中去就返回了。BINDER_CURRENT_PROTOCOL_VERSION是一个宏,定义在kernel/common/drivers/staging/android/binder.h文件中:
/* This is the current protocol version. */
#define BINDER_CURRENT_PROTOCOL_VERSION 7这里为什么要把ubuf转换成struct binder_version之后,再通过其protocol_version成员变量再来写入呢,转了一圈,最终内容还是写入到ubuf中。我们看一下struct binder_version的定义就会明白,同样是在kernel/common/drivers/staging/android/binder.h文件中:
/* Use with BINDER_VERSION, driver fills in fields. */
struct binder_version {
/* driver protocol version -- increment with incompatible change */
signed long protocol_version;
};从注释中可以看出来,这里是考虑到兼容性,因为以后很有可能不是用signed long来表示版本号。
这里有一个重要的地方要注意的是,由于这里是打开设备文件/dev/binder之后,第一次进入到binder_ioctl函数,因此,这里调用binder_get_thread的时候,就会为当前线程创建一个struct binder_thread结构体变量来维护线程上下文信息,具体可以参考浅谈Service Manager成为Android进程间通信(IPC)机制Binder守护进程之路一文。
接着我们再来看一下ioctl文件操作函数执行BINDER_SET_MAX_THREADS命令的过程:
result = ioctl(fd, BINDER_SET_MAX_THREADS, &maxThreads);这个函数调用最终进入到Binder驱动程序的binder_ioctl函数中,我们只关注BINDER_SET_MAX_THREADS相关的部分逻辑:
static long binder_ioctl(struct file *filp, unsigned int cmd, unsigned long arg)
{
int ret;
struct binder_proc *proc = filp->private_data;
struct binder_thread *thread;
unsigned int size = _IOC_SIZE(cmd);
void __user *ubuf = (void __user *)arg;
/*printk(KERN_INFO "binder_ioctl: %d:%d %x %lx\n", proc->pid, current->pid, cmd, arg);*/
ret = wait_event_interruptible(binder_user_error_wait, binder_stop_on_user_error < 2);
if (ret)
return ret;
mutex_lock(&binder_lock);
thread = binder_get_thread(proc);
if (thread == NULL) {
ret = -ENOMEM;
goto err;
}
switch (cmd) {
......
case BINDER_SET_MAX_THREADS:
if (copy_from_user(&proc->max_threads, ubuf, sizeof(proc->max_threads))) {
ret = -EINVAL;
goto err;
}
break;
......
}
ret = 0;
err:
......
return ret;
}这里实现也是非常简单,只是简单地把用户传进来的参数保存在proc->max_threads中就完毕了。注意,这里再调用binder_get_thread函数的时候,就可以在proc->threads中找到当前线程对应的struct binder_thread结构了,因为前面已经创建好并保存在proc->threads红黑树中。
回到ProcessState的构造函数中,这里还通过mmap函数来把设备文件/dev/binder映射到内存中,这个函数在浅谈Service Manager成为Android进程间通信(IPC)机制Binder守护进程之路一文也已经有详细介绍,这里不再重复描述。宏BINDER_VM_SIZE就定义在ProcessState.cpp文件中:
#define BINDER_VM_SIZE ((1*1024*1024) - (4096 *2))mmap函数调用完成之后,Binder驱动程序就为当前进程预留了BINDER_VM_SIZE大小的内存空间了。
这样,ProcessState全局唯一变量gProcess就创建完毕了,回到frameworks/base/media/mediaserver/main_mediaserver.cpp文件中的main函数,下一步是调用defaultServiceManager函数来获得Service Manager的远程接口,这个已经在上一篇文章浅谈Android系统进程间通信(IPC)机制Binder中的Server和Client获得Service Manager接口之路有详细描述,读者可以回过头去参考一下。
再接下来,就进入到MediaPlayerService::instantiate函数把MediaPlayerService添加到Service Manger中去了。这个函数定义在frameworks/base/media/libmediaplayerservice/MediaPlayerService.cpp文件中:
void MediaPlayerService::instantiate() {
defaultServiceManager()->addService(
String16("media.player"), new MediaPlayerService());
}我们重点看一下IServiceManger::addService的过程,这有助于我们加深对Binder机制的理解。
在上一篇文章浅谈Android系统进程间通信(IPC)机制Binder中的Server和Client获得Service Manager接口之路中说到,defaultServiceManager返回的实际是一个BpServiceManger类实例,因此,我们看一下BpServiceManger::addService的实现,这个函数实现在frameworks/base/libs/binder/IServiceManager.cpp文件中:
class BpServiceManager : public BpInterface<IServiceManager>
{
public:
BpServiceManager(const sp<IBinder>& impl)
: BpInterface<IServiceManager>(impl)
{
}
......
virtual status_t addService(const String16& name, const sp<IBinder>& service)
{
Parcel data, reply;
data.writeInterfaceToken(IServiceManager::getInterfaceDescriptor());
data.writeString16(name);
data.writeStrongBinder(service);
status_t err = remote()->transact(ADD_SERVICE_TRANSACTION, data, &reply);
return err == NO_ERROR ? reply.readExceptionCode()
}
......
};这里的Parcel类是用来于序列化进程间通信数据用的。
先来看这一句的调用:
data.writeInterfaceToken(IServiceManager::getInterfaceDescriptor());IServiceManager::getInterfaceDescriptor()返回来的是一个字符串,即"android.os.IServiceManager",具体可以参考IServiceManger的实现。我们看一下Parcel::writeInterfaceToken的实现,位于frameworks/base/libs/binder/Parcel.cpp文件中:
// Write RPC headers. (previously just the interface token)
status_t Parcel::writeInterfaceToken(const String16& interface)
{
writeInt32(IPCThreadState::self()->getStrictModePolicy() |
STRICT_MODE_PENALTY_GATHER);
// currently the interface identification token is just its name as a string
return writeString16(interface);
}它的作用是写入一个整数和一个字符串到Parcel中去。
再来看下面的调用:
data.writeString16(name);这里又是写入一个字符串到Parcel中去,这里的name即是上面传进来的"media.player"字符串。
往下看:
data.writeStrongBinder(service);这里定入一个Binder对象到Parcel去。我们重点看一下这个函数的实现,因为它涉及到进程间传输Binder实体的问题,比较复杂,需要重点关注,同时,也是理解Binder机制的一个重点所在。注意,这里的service参数是一个MediaPlayerService对象。
status_t Parcel::writeStrongBinder(const sp<IBinder>& val)
{
return flatten_binder(ProcessState::self(), val, this);
}看到flatten_binder函数,是不是似曾相识的感觉?我们在前面一篇文章浅谈Service Manager成为Android进程间通信(IPC)机制Binder守护进程之路中,曾经提到在Binder驱动程序中,使用struct flat_binder_object来表示传输中的一个binder对象,它的定义如下所示:
/*
* This is the flattened representation of a Binder object for transfer
* between processes. The 'offsets' supplied as part of a binder transaction
* contains offsets into the data where these structures occur. The Binder
* driver takes care of re-writing the structure type and data as it moves
* between processes.
*/
struct flat_binder_object {
/* 8 bytes for large_flat_header. */
unsigned long type;
unsigned long flags;
/* 8 bytes of data. */
union {
void *binder; /* local object */
signed long handle; /* remote object */
};
/* extra data associated with local object */
void *cookie;
};各个成员变量的含义请参考资料Android Binder设计与实现。
我们进入到flatten_binder函数看看:
status_t flatten_binder(const sp<ProcessState>& proc,
const sp<IBinder>& binder, Parcel* out)
{
flat_binder_object obj;
obj.flags = 0x7f | FLAT_BINDER_FLAG_ACCEPTS_FDS;
if (binder != NULL) {
IBinder *local = binder->localBinder();
if (!local) {
BpBinder *proxy = binder->remoteBinder();
if (proxy == NULL) {
LOGE("null proxy");
}
const int32_t handle = proxy ? proxy->handle() : 0;
obj.type = BINDER_TYPE_HANDLE;
obj.handle = handle;
obj.cookie = NULL;
} else {
obj.type = BINDER_TYPE_BINDER;
obj.binder = local->getWeakRefs();
obj.cookie = local;
}
} else {
obj.type = BINDER_TYPE_BINDER;
obj.binder = NULL;
obj.cookie = NULL;
}
return finish_flatten_binder(binder, obj, out);
}首先是初始化flat_binder_object的flags域:
obj.flags = 0x7f | FLAT_BINDER_FLAG_ACCEPTS_FDS;0x7f表示处理本Binder实体请求数据包的线程的最低优先级,FLAT_BINDER_FLAG_ACCEPTS_FDS表示这个Binder实体可以接受文件描述符,Binder实体在收到文件描述符时,就会在本进程中打开这个文件。
传进来的binder即为MediaPlayerService::instantiate函数中new出来的MediaPlayerService实例,因此,不为空。又由于MediaPlayerService继承自BBinder类,它是一个本地Binder实体,因此binder->localBinder返回一个BBinder指针,而且肯定不为空,于是执行下面语句:
obj.type = BINDER_TYPE_BINDER;
obj.binder = local->getWeakRefs();
obj.cookie = local;设置了flat_binder_obj的其他成员变量,注意,指向这个Binder实体地址的指针local保存在flat_binder_obj的成员变量cookie中。
函数调用finish_flatten_binder来将这个flat_binder_obj写入到Parcel中去:
inline static status_t finish_flatten_binder(
const sp<IBinder>& binder, const flat_binder_object& flat, Parcel* out)
{
return out->writeObject(flat, false);
}Parcel::writeObject的实现如下:
status_t Parcel::writeObject(const flat_binder_object& val, bool nullMetaData)
{
const bool enoughData = (mDataPos+sizeof(val)) <= mDataCapacity;
const bool enoughObjects = mObjectsSize < mObjectsCapacity;
if (enoughData && enoughObjects) {
restart_write:
*reinterpret_cast<flat_binder_object*>(mData+mDataPos) = val;
// Need to write meta-data?
if (nullMetaData || val.binder != NULL) {
mObjects[mObjectsSize] = mDataPos;
acquire_object(ProcessState::self(), val, this);
mObjectsSize++;
}
// remember if it's a file descriptor
if (val.type == BINDER_TYPE_FD) {
mHasFds = mFdsKnown = true;
}
return finishWrite(sizeof(flat_binder_object));
}
if (!enoughData) {
const status_t err = growData(sizeof(val));
if (err != NO_ERROR) return err;
}
if (!enoughObjects) {
size_t newSize = ((mObjectsSize+2)*3)/2;
size_t* objects = (size_t*)realloc(mObjects, newSize*sizeof(size_t));
if (objects == NULL) return NO_MEMORY;
mObjects = objects;
mObjectsCapacity = newSize;
}
goto restart_write;
}这里除了把flat_binder_obj写到Parcel里面之内,还要记录这个flat_binder_obj在Parcel里面的偏移位置:
mObjects[mObjectsSize] = mDataPos;这里因为,如果进程间传输的数据间带有Binder对象的时候,Binder驱动程序需要作进一步的处理,以维护各个Binder实体的一致性,下面我们将会看到Binder驱动程序是怎么处理这些Binder对象的。
再回到BpServiceManager::addService函数中,调用下面语句:
status_t err = remote()->transact(ADD_SERVICE_TRANSACTION, data, &reply);回到浅谈Android系统进程间通信(IPC)机制Binder中的Server和Client获得Service Manager接口之路一文中的类图中去看一下,这里的remote成员函数来自于BpRefBase类,它返回一个BpBinder指针。因此,我们继续进入到BpBinder::transact函数中去看看:
status_t BpBinder::transact(
uint32_t code, const Parcel& data, Parcel* reply, uint32_t flags)
{
// Once a binder has died, it will never come back to life.
if (mAlive) {
status_t status = IPCThreadState::self()->transact(
mHandle, code, data, reply, flags);
if (status == DEAD_OBJECT) mAlive = 0;
return status;
}
return DEAD_OBJECT;
}这里又调用了IPCThreadState::transact进执行实际的操作。注意,这里的mHandle为0,code为ADD_SERVICE_TRANSACTION。ADD_SERVICE_TRANSACTION是上面以参数形式传进来的,那mHandle为什么是0呢?因为这里表示的是Service Manager远程接口,它的句柄值一定是0,具体请参考浅谈Android系统进程间通信(IPC)机制Binder中的Server和Client获得Service Manager接口之路一文。 再进入到IPCThreadState::transact函数,看看做了些什么事情:
status_t IPCThreadState::transact(int32_t handle,
uint32_t code, const Parcel& data,
Parcel* reply, uint32_t flags)
{
status_t err = data.errorCheck();
flags |= TF_ACCEPT_FDS;
IF_LOG_TRANSACTIONS() {
TextOutput::Bundle _b(alog);
alog << "BC_TRANSACTION thr " << (void*)pthread_self() << " / hand "
<< handle << " / code " << TypeCode(code) << ": "
<< indent << data << dedent << endl;
}
if (err == NO_ERROR) {
LOG_ONEWAY(">>>> SEND from pid %d uid %d %s", getpid(), getuid(),
(flags & TF_ONE_WAY) == 0 ? "READ REPLY" : "ONE WAY");
err = writeTransactionData(BC_TRANSACTION, flags, handle, code, data, NULL);
}
if (err != NO_ERROR) {
if (reply) reply->setError(err);
return (mLastError = err);
}
if ((flags & TF_ONE_WAY) == 0) {
#if 0
if (code == 4) { // relayout
LOGI(">>>>>> CALLING transaction 4");
} else {
LOGI(">>>>>> CALLING transaction %d", code);
}
#endif
if (reply) {
err = waitForResponse(reply);
} else {
Parcel fakeReply;
err = waitForResponse(&fakeReply);
}
#if 0
if (code == 4) { // relayout
LOGI("<<<<<< RETURNING transaction 4");
} else {
LOGI("<<<<<< RETURNING transaction %d", code);
}
#endif
IF_LOG_TRANSACTIONS() {
TextOutput::Bundle _b(alog);
alog << "BR_REPLY thr " << (void*)pthread_self() << " / hand "
<< handle << ": ";
if (reply) alog << indent << *reply << dedent << endl;
else alog << "(none requested)" << endl;
}
} else {
err = waitForResponse(NULL, NULL);
}
return err;
}IPCThreadState::transact函数的参数flags是一个默认值为0的参数,上面没有传相应的实参进来,因此,这里就为0。
函数首先调用writeTransactionData函数准备好一个struct binder_transaction_data结构体变量,这个是等一下要传输给Binder驱动程序的。struct binder_transaction_data的定义我们在浅谈Service Manager成为Android进程间通信(IPC)机制Binder守护进程之路一文中有详细描述,读者不妨回过去读一下。这里为了方便描述,将struct binder_transaction_data的定义再次列出来:
struct binder_transaction_data {
/* The first two are only used for bcTRANSACTION and brTRANSACTION,
* identifying the target and contents of the transaction.
*/
union {
size_t handle; /* target descriptor of command transaction */
void *ptr; /* target descriptor of return transaction */
} target;
void *cookie; /* target object cookie */
unsigned int code; /* transaction command */
/* General information about the transaction. */
unsigned int flags;
pid_t sender_pid;
uid_t sender_euid;
size_t data_size; /* number of bytes of data */
size_t offsets_size; /* number of bytes of offsets */
/* If this transaction is inline, the data immediately
* follows here; otherwise, it ends with a pointer to
* the data buffer.
*/
union {
struct {
/* transaction data */
const void *buffer;
/* offsets from buffer to flat_binder_object structs */
const void *offsets;
} ptr;
uint8_t buf[8];
} data;
};writeTransactionData函数的实现如下:
status_t IPCThreadState::writeTransactionData(int32_t cmd, uint32_t binderFlags,
int32_t handle, uint32_t code, const Parcel& data, status_t* statusBuffer)
{
binder_transaction_data tr;
tr.target.handle = handle;
tr.code = code;
tr.flags = binderFlags;
const status_t err = data.errorCheck();
if (err == NO_ERROR) {
tr.data_size = data.ipcDataSize();
tr.data.ptr.buffer = data.ipcData();
tr.offsets_size = data.ipcObjectsCount()*sizeof(size_t);
tr.data.ptr.offsets = data.ipcObjects();
} else if (statusBuffer) {
tr.flags |= TF_STATUS_CODE;
*statusBuffer = err;
tr.data_size = sizeof(status_t);
tr.data.ptr.buffer = statusBuffer;
tr.offsets_size = 0;
tr.data.ptr.offsets = NULL;
} else {
return (mLastError = err);
}
mOut.writeInt32(cmd);
mOut.write(&tr, sizeof(tr));
return NO_ERROR;
}注意,这里的cmd为BC_TRANSACTION。 这个函数很简单,在这个场景下,就是执行下面语句来初始化本地变量tr:
tr.data_size = data.ipcDataSize();
tr.data.ptr.buffer = data.ipcData();
tr.offsets_size = data.ipcObjectsCount()*sizeof(size_t);
tr.data.ptr.offsets = data.ipcObjects();回忆一下上面的内容,写入到tr.data.ptr.buffer的内容相当于下面的内容:
writeInt32(IPCThreadState::self()->getStrictModePolicy() |
STRICT_MODE_PENALTY_GATHER);
writeString16("android.os.IServiceManager");
writeString16("media.player");
writeStrongBinder(new MediaPlayerService());其中包含了一个Binder实体MediaPlayerService,因此需要设置tr.offsets_size就为1,tr.data.ptr.offsets就指向了这个MediaPlayerService的地址在tr.data.ptr.buffer中的偏移量。最后,将tr的内容保存在IPCThreadState的成员变量mOut中。 回到IPCThreadState::transact函数中,接下去看,(flags & TF_ONE_WAY) == 0为true,并且reply不为空,所以最终进入到waitForResponse(reply)这条路径来。我们看一下waitForResponse函数的实现:
status_t IPCThreadState::waitForResponse(Parcel *reply, status_t *acquireResult)
{
int32_t cmd;
int32_t err;
while (1) {
if ((err=talkWithDriver()) < NO_ERROR) break;
err = mIn.errorCheck();
if (err < NO_ERROR) break;
if (mIn.dataAvail() == 0) continue;
cmd = mIn.readInt32();
IF_LOG_COMMANDS() {
alog << "Processing waitForResponse Command: "
<< getReturnString(cmd) << endl;
}
switch (cmd) {
case BR_TRANSACTION_COMPLETE:
if (!reply && !acquireResult) goto finish;
break;
case BR_DEAD_REPLY:
err = DEAD_OBJECT;
goto finish;
case BR_FAILED_REPLY:
err = FAILED_TRANSACTION;
goto finish;
case BR_ACQUIRE_RESULT:
{
LOG_ASSERT(acquireResult != NULL, "Unexpected brACQUIRE_RESULT");
const int32_t result = mIn.readInt32();
if (!acquireResult) continue;
*acquireResult = result ? NO_ERROR : INVALID_OPERATION;
}
goto finish;
case BR_REPLY:
{
binder_transaction_data tr;
err = mIn.read(&tr, sizeof(tr));
LOG_ASSERT(err == NO_ERROR, "Not enough command data for brREPLY");
if (err != NO_ERROR) goto finish;
if (reply) {
if ((tr.flags & TF_STATUS_CODE) == 0) {
reply->ipcSetDataReference(
reinterpret_cast<const uint8_t*>(tr.data.ptr.buffer),
tr.data_size,
reinterpret_cast<const size_t*>(tr.data.ptr.offsets),
tr.offsets_size/sizeof(size_t),
freeBuffer, this);
} else {
err = *static_cast<const status_t*>(tr.data.ptr.buffer);
freeBuffer(NULL,
reinterpret_cast<const uint8_t*>(tr.data.ptr.buffer),
tr.data_size,
reinterpret_cast<const size_t*>(tr.data.ptr.offsets),
tr.offsets_size/sizeof(size_t), this);
}
} else {
freeBuffer(NULL,
reinterpret_cast<const uint8_t*>(tr.data.ptr.buffer),
tr.data_size,
reinterpret_cast<const size_t*>(tr.data.ptr.offsets),
tr.offsets_size/sizeof(size_t), this);
continue;
}
}
goto finish;
default:
err = executeCommand(cmd);
if (err != NO_ERROR) goto finish;
break;
}
}
finish:
if (err != NO_ERROR) {
if (acquireResult) *acquireResult = err;
if (reply) reply->setError(err);
mLastError = err;
}
return err;
}这个函数虽然很长,但是主要调用了talkWithDriver函数来与Binder驱动程序进行交互:
status_t IPCThreadState::talkWithDriver(bool doReceive)
{
LOG_ASSERT(mProcess->mDriverFD >= 0, "Binder driver is not opened");
binder_write_read bwr;
// Is the read buffer empty?
const bool needRead = mIn.dataPosition() >= mIn.dataSize();
// We don't want to write anything if we are still reading
// from data left in the input buffer and the caller
// has requested to read the next data.
const size_t outAvail = (!doReceive || needRead) ? mOut.dataSize() : 0;
bwr.write_size = outAvail;
bwr.write_buffer = (long unsigned int)mOut.data();
// This is what we'll read.
if (doReceive && needRead) {
bwr.read_size = mIn.dataCapacity();
bwr.read_buffer = (long unsigned int)mIn.data();
} else {
bwr.read_size = 0;
}
IF_LOG_COMMANDS() {
TextOutput::Bundle _b(alog);
if (outAvail != 0) {
alog << "Sending commands to driver: " << indent;
const void* cmds = (const void*)bwr.write_buffer;
const void* end = ((const uint8_t*)cmds)+bwr.write_size;
alog << HexDump(cmds, bwr.write_size) << endl;
while (cmds < end) cmds = printCommand(alog, cmds);
alog << dedent;
}
alog << "Size of receive buffer: " << bwr.read_size
<< ", needRead: " << needRead << ", doReceive: " << doReceive << endl;
}
// Return immediately if there is nothing to do.
if ((bwr.write_size == 0) && (bwr.read_size == 0)) return NO_ERROR;
bwr.write_consumed = 0;
bwr.read_consumed = 0;
status_t err;
do {
IF_LOG_COMMANDS() {
alog << "About to read/write, write size = " << mOut.dataSize() << endl;
}
#if defined(HAVE_ANDROID_OS)
if (ioctl(mProcess->mDriverFD, BINDER_WRITE_READ, &bwr) >= 0)
err = NO_ERROR;
else
err = -errno;
#else
err = INVALID_OPERATION;
#endif
IF_LOG_COMMANDS() {
alog << "Finished read/write, write size = " << mOut.dataSize() << endl;
}
} while (err == -EINTR);
IF_LOG_COMMANDS() {
alog << "Our err: " << (void*)err << ", write consumed: "
<< bwr.write_consumed << " (of " << mOut.dataSize()
<< "), read consumed: " << bwr.read_consumed << endl;
}
if (err >= NO_ERROR) {
if (bwr.write_consumed > 0) {
if (bwr.write_consumed < (ssize_t)mOut.dataSize())
mOut.remove(0, bwr.write_consumed);
else
mOut.setDataSize(0);
}
if (bwr.read_consumed > 0) {
mIn.setDataSize(bwr.read_consumed);
mIn.setDataPosition(0);
}
IF_LOG_COMMANDS() {
TextOutput::Bundle _b(alog);
alog << "Remaining data size: " << mOut.dataSize() << endl;
alog << "Received commands from driver: " << indent;
const void* cmds = mIn.data();
const void* end = mIn.data() + mIn.dataSize();
alog << HexDump(cmds, mIn.dataSize()) << endl;
while (cmds < end) cmds = printReturnCommand(alog, cmds);
alog << dedent;
}
return NO_ERROR;
}
return err;
}这里doReceive和needRead均为1,有兴趣的读者可以自已分析一下。因此,这里告诉Binder驱动程序,先执行write操作,再执行read操作,下面我们将会看到。
最后,通过ioctl(mProcess->mDriverFD, BINDER_WRITE_READ, &bwr)进行到Binder驱动程序的binder_ioctl函数,我们只关注cmd为BINDER_WRITE_READ的逻辑:
static long binder_ioctl(struct file *filp, unsigned int cmd, unsigned long arg)
{
int ret;
struct binder_proc *proc = filp->private_data;
struct binder_thread *thread;
unsigned int size = _IOC_SIZE(cmd);
void __user *ubuf = (void __user *)arg;
/*printk(KERN_INFO "binder_ioctl: %d:%d %x %lx\n", proc->pid, current->pid, cmd, arg);*/
ret = wait_event_interruptible(binder_user_error_wait, binder_stop_on_user_error < 2);
if (ret)
return ret;
mutex_lock(&binder_lock);
thread = binder_get_thread(proc);
if (thread == NULL) {
ret = -ENOMEM;
goto err;
}
switch (cmd) {
case BINDER_WRITE_READ: {
struct binder_write_read bwr;
if (size != sizeof(struct binder_write_read)) {
ret = -EINVAL;
goto err;
}
if (copy_from_user(&bwr, ubuf, sizeof(bwr))) {
ret = -EFAULT;
goto err;
}
if (binder_debug_mask & BINDER_DEBUG_READ_WRITE)
printk(KERN_INFO "binder: %d:%d write %ld at %08lx, read %ld at %08lx\n",
proc->pid, thread->pid, bwr.write_size, bwr.write_buffer, bwr.read_size, bwr.read_buffer);
if (bwr.write_size > 0) {
ret = binder_thread_write(proc, thread, (void __user *)bwr.write_buffer, bwr.write_size, &bwr.write_consumed);
if (ret < 0) {
bwr.read_consumed = 0;
if (copy_to_user(ubuf, &bwr, sizeof(bwr)))
ret = -EFAULT;
goto err;
}
}
if (bwr.read_size > 0) {
ret = binder_thread_read(proc, thread, (void __user *)bwr.read_buffer, bwr.read_size, &bwr.read_consumed, filp->f_flags & O_NONBLOCK);
if (!list_empty(&proc->todo))
wake_up_interruptible(&proc->wait);
if (ret < 0) {
if (copy_to_user(ubuf, &bwr, sizeof(bwr)))
ret = -EFAULT;
goto err;
}
}
if (binder_debug_mask & BINDER_DEBUG_READ_WRITE)
printk(KERN_INFO "binder: %d:%d wrote %ld of %ld, read return %ld of %ld\n",
proc->pid, thread->pid, bwr.write_consumed, bwr.write_size, bwr.read_consumed, bwr.read_size);
if (copy_to_user(ubuf, &bwr, sizeof(bwr))) {
ret = -EFAULT;
goto err;
}
break;
}
......
}
ret = 0;
err:
......
return ret;
}函数首先是将用户传进来的参数拷贝到本地变量struct binder_write_read bwr中去。这里bwr.write_size > 0为true,因此,进入到binder_thread_write函数中,我们只关注BC_TRANSACTION部分的逻辑:
binder_thread_write(struct binder_proc *proc, struct binder_thread *thread,
void __user *buffer, int size, signed long *consumed)
{
uint32_t cmd;
void __user *ptr = buffer + *consumed;
void __user *end = buffer + size;
while (ptr < end && thread->return_error == BR_OK) {
if (get_user(cmd, (uint32_t __user *)ptr))
return -EFAULT;
ptr += sizeof(uint32_t);
if (_IOC_NR(cmd) < ARRAY_SIZE(binder_stats.bc)) {
binder_stats.bc[_IOC_NR(cmd)]++;
proc->stats.bc[_IOC_NR(cmd)]++;
thread->stats.bc[_IOC_NR(cmd)]++;
}
switch (cmd) {
.....
case BC_TRANSACTION:
case BC_REPLY: {
struct binder_transaction_data tr;
if (copy_from_user(&tr, ptr, sizeof(tr)))
return -EFAULT;
ptr += sizeof(tr);
binder_transaction(proc, thread, &tr, cmd == BC_REPLY);
break;
}
......
}
*consumed = ptr - buffer;
}
return 0;
}首先将用户传进来的transact参数拷贝在本地变量struct binder_transaction_data tr中去,接着调用binder_transaction函数进一步处理,这里我们忽略掉无关代码:
static void
binder_transaction(struct binder_proc *proc, struct binder_thread *thread,
struct binder_transaction_data *tr, int reply)
{
struct binder_transaction *t;
struct binder_work *tcomplete;
size_t *offp, *off_end;
struct binder_proc *target_proc;
struct binder_thread *target_thread = NULL;
struct binder_node *target_node = NULL;
struct list_head *target_list;
wait_queue_head_t *target_wait;
struct binder_transaction *in_reply_to = NULL;
struct binder_transaction_log_entry *e;
uint32_t return_error;
......
if (reply) {
......
} else {
if (tr->target.handle) {
......
} else {
target_node = binder_context_mgr_node;
if (target_node == NULL) {
return_error = BR_DEAD_REPLY;
goto err_no_context_mgr_node;
}
}
......
target_proc = target_node->proc;
if (target_proc == NULL) {
return_error = BR_DEAD_REPLY;
goto err_dead_binder;
}
......
}
if (target_thread) {
......
} else {
target_list = &target_proc->todo;
target_wait = &target_proc->wait;
}
......
/* TODO: reuse incoming transaction for reply */
t = kzalloc(sizeof(*t), GFP_KERNEL);
if (t == NULL) {
return_error = BR_FAILED_REPLY;
goto err_alloc_t_failed;
}
......
tcomplete = kzalloc(sizeof(*tcomplete), GFP_KERNEL);
if (tcomplete == NULL) {
return_error = BR_FAILED_REPLY;
goto err_alloc_tcomplete_failed;
}
......
if (!reply && !(tr->flags & TF_ONE_WAY))
t->from = thread;
else
t->from = NULL;
t->sender_euid = proc->tsk->cred->euid;
t->to_proc = target_proc;
t->to_thread = target_thread;
t->code = tr->code;
t->flags = tr->flags;
t->priority = task_nice(current);
t->buffer = binder_alloc_buf(target_proc, tr->data_size,
tr->offsets_size, !reply && (t->flags & TF_ONE_WAY));
if (t->buffer == NULL) {
return_error = BR_FAILED_REPLY;
goto err_binder_alloc_buf_failed;
}
t->buffer->allow_user_free = 0;
t->buffer->debug_id = t->debug_id;
t->buffer->transaction = t;
t->buffer->target_node = target_node;
if (target_node)
binder_inc_node(target_node, 1, 0, NULL);
offp = (size_t *)(t->buffer->data + ALIGN(tr->data_size, sizeof(void *)));
if (copy_from_user(t->buffer->data, tr->data.ptr.buffer, tr->data_size)) {
......
return_error = BR_FAILED_REPLY;
goto err_copy_data_failed;
}
if (copy_from_user(offp, tr->data.ptr.offsets, tr->offsets_size)) {
......
return_error = BR_FAILED_REPLY;
goto err_copy_data_failed;
}
......
off_end = (void *)offp + tr->offsets_size;
for (; offp < off_end; offp++) {
struct flat_binder_object *fp;
......
fp = (struct flat_binder_object *)(t->buffer->data + *offp);
switch (fp->type) {
case BINDER_TYPE_BINDER:
case BINDER_TYPE_WEAK_BINDER: {
struct binder_ref *ref;
struct binder_node *node = binder_get_node(proc, fp->binder);
if (node == NULL) {
node = binder_new_node(proc, fp->binder, fp->cookie);
if (node == NULL) {
return_error = BR_FAILED_REPLY;
goto err_binder_new_node_failed;
}
node->min_priority = fp->flags & FLAT_BINDER_FLAG_PRIORITY_MASK;
node->accept_fds = !!(fp->flags & FLAT_BINDER_FLAG_ACCEPTS_FDS);
}
if (fp->cookie != node->cookie) {
......
goto err_binder_get_ref_for_node_failed;
}
ref = binder_get_ref_for_node(target_proc, node);
if (ref == NULL) {
return_error = BR_FAILED_REPLY;
goto err_binder_get_ref_for_node_failed;
}
if (fp->type == BINDER_TYPE_BINDER)
fp->type = BINDER_TYPE_HANDLE;
else
fp->type = BINDER_TYPE_WEAK_HANDLE;
fp->handle = ref->desc;
binder_inc_ref(ref, fp->type == BINDER_TYPE_HANDLE, &thread->todo);
......
} break;
......
}
}
if (reply) {
......
} else if (!(t->flags & TF_ONE_WAY)) {
BUG_ON(t->buffer->async_transaction != 0);
t->need_reply = 1;
t->from_parent = thread->transaction_stack;
thread->transaction_stack = t;
} else {
......
}
t->work.type = BINDER_WORK_TRANSACTION;
list_add_tail(&t->work.entry, target_list);
tcomplete->type = BINDER_WORK_TRANSACTION_COMPLETE;
list_add_tail(&tcomplete->entry, &thread->todo);
if (target_wait)
wake_up_interruptible(target_wait);
return;
......
}注意,这里传进来的参数reply为0,tr->target.handle也为0。因此,target_proc、target_thread、target_node、target_list和target_wait的值分别为:
target_node = binder_context_mgr_node;
target_proc = target_node->proc;
target_list = &target_proc->todo;
target_wait = &target_proc->wait; 接着,分配了一个待处理事务t和一个待完成工作项tcomplete,并执行初始化工作:
/* TODO: reuse incoming transaction for reply */
t = kzalloc(sizeof(*t), GFP_KERNEL);
if (t == NULL) {
return_error = BR_FAILED_REPLY;
goto err_alloc_t_failed;
}
......
tcomplete = kzalloc(sizeof(*tcomplete), GFP_KERNEL);
if (tcomplete == NULL) {
return_error = BR_FAILED_REPLY;
goto err_alloc_tcomplete_failed;
}
......
if (!reply && !(tr->flags & TF_ONE_WAY))
t->from = thread;
else
t->from = NULL;
t->sender_euid = proc->tsk->cred->euid;
t->to_proc = target_proc;
t->to_thread = target_thread;
t->code = tr->code;
t->flags = tr->flags;
t->priority = task_nice(current);
t->buffer = binder_alloc_buf(target_proc, tr->data_size,
tr->offsets_size, !reply && (t->flags & TF_ONE_WAY));
if (t->buffer == NULL) {
return_error = BR_FAILED_REPLY;
goto err_binder_alloc_buf_failed;
}
t->buffer->allow_user_free = 0;
t->buffer->debug_id = t->debug_id;
t->buffer->transaction = t;
t->buffer->target_node = target_node;
if (target_node)
binder_inc_node(target_node, 1, 0, NULL);
offp = (size_t *)(t->buffer->data + ALIGN(tr->data_size, sizeof(void *)));
if (copy_from_user(t->buffer->data, tr->data.ptr.buffer, tr->data_size)) {
......
return_error = BR_FAILED_REPLY;
goto err_copy_data_failed;
}
if (copy_from_user(offp, tr->data.ptr.offsets, tr->offsets_size)) {
......
return_error = BR_FAILED_REPLY;
goto err_copy_data_failed;
}注意,这里的事务t是要交给target_proc处理的,在这个场景之下,就是Service Manager了。因此,下面的语句:
t->buffer = binder_alloc_buf(target_proc, tr->data_size,
tr->offsets_size, !reply && (t->flags & TF_ONE_WAY));就是在Service Manager的进程空间中分配一块内存来保存用户传进入的参数了:
if (copy_from_user(t->buffer->data, tr->data.ptr.buffer, tr->data_size)) {
......
return_error = BR_FAILED_REPLY;
goto err_copy_data_failed;
}
if (copy_from_user(offp, tr->data.ptr.offsets, tr->offsets_size)) {
......
return_error = BR_FAILED_REPLY;
goto err_copy_data_failed;
}由于现在target_node要被使用了,增加它的引用计数:
if (target_node)
binder_inc_node(target_node, 1, 0, NULL);接下去的for循环,就是用来处理传输数据中的Binder对象了。在我们的场景中,有一个类型为BINDER_TYPE_BINDER的Binder实体MediaPlayerService:
switch (fp->type) {
case BINDER_TYPE_BINDER:
case BINDER_TYPE_WEAK_BINDER: {
struct binder_ref *ref;
struct binder_node *node = binder_get_node(proc, fp->binder);
if (node == NULL) {
node = binder_new_node(proc, fp->binder, fp->cookie);
if (node == NULL) {
return_error = BR_FAILED_REPLY;
goto err_binder_new_node_failed;
}
node->min_priority = fp->flags & FLAT_BINDER_FLAG_PRIORITY_MASK;
node->accept_fds = !!(fp->flags & FLAT_BINDER_FLAG_ACCEPTS_FDS);
}
if (fp->cookie != node->cookie) {
......
goto err_binder_get_ref_for_node_failed;
}
ref = binder_get_ref_for_node(target_proc, node);
if (ref == NULL) {
return_error = BR_FAILED_REPLY;
goto err_binder_get_ref_for_node_failed;
}
if (fp->type == BINDER_TYPE_BINDER)
fp->type = BINDER_TYPE_HANDLE;
else
fp->type = BINDER_TYPE_WEAK_HANDLE;
fp->handle = ref->desc;
binder_inc_ref(ref, fp->type == BINDER_TYPE_HANDLE, &thread->todo);
......
} break;由于是第一次在Binder驱动程序中传输这个MediaPlayerService,调用binder_get_node函数查询这个Binder实体时,会返回空,于是binder_new_node在proc中新建一个,下次就可以直接使用了。
现在,由于要把这个Binder实体MediaPlayerService交给target_proc,也就是Service Manager来管理,也就是说Service Manager要引用这个MediaPlayerService了,于是通过binder_get_ref_for_node为MediaPlayerService创建一个引用,并且通过binder_inc_ref来增加这个引用计数,防止这个引用还在使用过程当中就被销毁。注意,到了这里的时候,t->buffer中的flat_binder_obj的type已经改为BINDER_TYPE_HANDLE,handle已经改为ref->desc,跟原来不一样了,因为这个flat_binder_obj是最终是要传给Service Manager的,而Service Manager只能够通过句柄值来引用这个Binder实体。
最后,把待处理事务加入到target_list列表中去:
list_add_tail(&t->work.entry, target_list);并且把待完成工作项加入到本线程的todo等待执行列表中去:
list_add_tail(&tcomplete->entry, &thread->todo);现在目标进程有事情可做了,于是唤醒它:
if (target_wait)
wake_up_interruptible(target_wait);这里就是要唤醒Service Manager进程了。回忆一下前面浅谈Service Manager成为Android进程间通信(IPC)机制Binder守护进程之路这篇文章,此时, Service Manager正在binder_thread_read函数中调用wait_event_interruptible进入休眠状态。
这里我们先忽略一下Service Manager被唤醒之后的场景,继续MedaPlayerService的启动过程,然后再回来。
回到binder_ioctl函数,bwr.read_size > 0为true,于是进入binder_thread_read函数:
static int
binder_thread_read(struct binder_proc *proc, struct binder_thread *thread,
void __user *buffer, int size, signed long *consumed, int non_block)
{
void __user *ptr = buffer + *consumed;
void __user *end = buffer + size;
int ret = 0;
int wait_for_proc_work;
if (*consumed == 0) {
if (put_user(BR_NOOP, (uint32_t __user *)ptr))
return -EFAULT;
ptr += sizeof(uint32_t);
}
retry:
wait_for_proc_work = thread->transaction_stack == NULL && list_empty(&thread->todo);
.......
if (wait_for_proc_work) {
.......
} else {
if (non_block) {
if (!binder_has_thread_work(thread))
ret = -EAGAIN;
} else
ret = wait_event_interruptible(thread->wait, binder_has_thread_work(thread));
}
......
while (1) {
uint32_t cmd;
struct binder_transaction_data tr;
struct binder_work *w;
struct binder_transaction *t = NULL;
if (!list_empty(&thread->todo))
w = list_first_entry(&thread->todo, struct binder_work, entry);
else if (!list_empty(&proc->todo) && wait_for_proc_work)
w = list_first_entry(&proc->todo, struct binder_work, entry);
else {
if (ptr - buffer == 4 && !(thread->looper & BINDER_LOOPER_STATE_NEED_RETURN)) /* no data added */
goto retry;
break;
}
if (end - ptr < sizeof(tr) + 4)
break;
switch (w->type) {
......
case BINDER_WORK_TRANSACTION_COMPLETE: {
cmd = BR_TRANSACTION_COMPLETE;
if (put_user(cmd, (uint32_t __user *)ptr))
return -EFAULT;
ptr += sizeof(uint32_t);
binder_stat_br(proc, thread, cmd);
if (binder_debug_mask & BINDER_DEBUG_TRANSACTION_COMPLETE)
printk(KERN_INFO "binder: %d:%d BR_TRANSACTION_COMPLETE\n",
proc->pid, thread->pid);
list_del(&w->entry);
kfree(w);
binder_stats.obj_deleted[BINDER_STAT_TRANSACTION_COMPLETE]++;
} break;
......
}
if (!t)
continue;
......
}
done:
......
return 0;
}这里,thread->transaction_stack和thread->todo均不为空,于是wait_for_proc_work为false,由于binder_has_thread_work的时候,返回true,这里因为thread->todo不为空,因此,线程虽然调用了wait_event_interruptible,但是不会睡眠,于是继续往下执行。
由于thread->todo不为空,执行下列语句:
if (!list_empty(&thread->todo))
w = list_first_entry(&thread->todo, struct binder_work, entry);w->type为BINDER_WORK_TRANSACTION_COMPLETE,这是在上面的binder_transaction函数设置的,于是执行:
switch (w->type) {
......
case BINDER_WORK_TRANSACTION_COMPLETE: {
cmd = BR_TRANSACTION_COMPLETE;
if (put_user(cmd, (uint32_t __user *)ptr))
return -EFAULT;
ptr += sizeof(uint32_t);
......
list_del(&w->entry);
kfree(w);
} break;
......
}这里就将w从thread->todo删除了。由于这里t为空,重新执行while循环,这时由于已经没有事情可做了,最后就返回到binder_ioctl函数中。注间,这里一共往用户传进来的缓冲区buffer写入了两个整数,分别是BR_NOOP和BR_TRANSACTION_COMPLETE。
binder_ioctl函数返回到用户空间之前,把数据消耗情况拷贝回用户空间中:
if (copy_to_user(ubuf, &bwr, sizeof(bwr))) {
ret = -EFAULT;
goto err;
}最后返回到IPCThreadState::talkWithDriver函数中,执行下面语句:
if (err >= NO_ERROR) {
if (bwr.write_consumed > 0) {
if (bwr.write_consumed < (ssize_t)mOut.dataSize())
mOut.remove(0, bwr.write_consumed);
else
mOut.setDataSize(0);
}
if (bwr.read_consumed > 0) {
mIn.setDataSize(bwr.read_consumed); mIn.setDataPosition(0);
} ...... return NO_ERROR; }`
首先是把mOut的数据清空:
mOut.setDataSize(0);
然后设置已经读取的内容的大小:
mIn.setDataSize(bwr.read_consumed); mIn.setDataPosition(0);
然后返回到IPCThreadState::waitForResponse函数中。在IPCThreadState::waitForResponse函数,先是从mIn读出一个整数,这个便是BR_NOOP了,这是一个空操作,什么也不做。然后继续进入IPCThreadState::talkWithDriver函数中。
这时候,下面语句执行后:
const bool needRead = mIn.dataPosition() >= mIn.dataSize();
needRead为false,因为在mIn中,尚有一个整数BR_TRANSACTION_COMPLETE未读出。
这时候,下面语句执行后:
const size_t outAvail = (!doReceive || needRead) ? mOut.dataSize() : 0;
outAvail等于0。因此,最后bwr.write_size和bwr.read_size均为0,IPCThreadState::talkWithDriver函数什么也不做,直接返回到IPCThreadState::waitForResponse函数中。在IPCThreadState::waitForResponse函数,又继续从mIn读出一个整数,这个便是BR_TRANSACTION_COMPLETE:
switch (cmd) { case BR_TRANSACTION_COMPLETE: if (!reply && !acquireResult) goto finish; break; ...... }
reply不为NULL,因此,IPCThreadState::waitForResponse的循环没有结束,继续执行,又进入到IPCThreadState::talkWithDrive中。
这次,needRead就为true了,而outAvail仍为0,所以bwr.read_size不为0,bwr.write_size为0。于是通过:
ioctl(mProcess->mDriverFD, BINDER_WRITE_READ, &bwr)
进入到Binder驱动程序中的binder_ioctl函数中。由于bwr.write_size为0,bwr.read_size不为0,这次直接就进入到binder_thread_read函数中。这时候,thread->transaction_stack不等于0,但是thread->todo为空,于是线程就通过:
wait_event_interruptible(thread->wait, binder_has_thread_work(thread));
进入睡眠状态,等待Service Manager来唤醒了。
现在,我们可以回到Service Manager被唤醒的过程了。我们接着前面[浅谈Service Manager成为Android进程间通信(IPC)机制Binder守护进程之路](https://www.androidos.net.cn/redirecturl.do?url=http%3A//blog.csdn.net/luoshengyang/article/details/6621566)这篇文章的最后,继续描述。此时, Service Manager正在binder_thread_read函数中调用wait_event_interruptible_exclusive进入休眠状态。上面被MediaPlayerService启动后进程唤醒后,继续执行binder_thread_read函数:
static int binder_thread_read(struct binder_proc proc, struct binder_thread thread, void __user buffer, int size, signed long consumed, int non_block) { void user ptr = buffer + consumed; void user *end = buffer + size;
int ret = 0; int wait_for_proc_work;
if (consumed == 0) { if (put_user(BR_NOOP, (uint32_t __user )ptr)) return -EFAULT; ptr += sizeof(uint32_t); }
retry: wait_for_proc_work = thread->transaction_stack == NULL && list_empty(&thread->todo);
......
if (wait_for_proc_work) { ...... if (non_block) { if (!binder_has_proc_work(proc, thread)) ret = -EAGAIN; } else ret = wait_event_interruptible_exclusive(proc->wait, binder_has_proc_work(proc, thread)); } else { ...... }
......
while (1) { uint32_t cmd; struct binder_transaction_data tr; struct binder_work w; struct binder_transaction t = NULL;
if (!list_empty(&thread->todo)) w = list_first_entry(&thread->todo, struct binder_work, entry); else if (!list_empty(&proc->todo) && wait_for_proc_work) w = list_first_entry(&proc->todo, struct binder_work, entry); else { if (ptr - buffer == 4 && !(thread->looper & BINDER_LOOPER_STATE_NEED_RETURN)) / no data added / goto retry; break; }
if (end - ptr < sizeof(tr) + 4) break;
switch (w->type) { case BINDER_WORK_TRANSACTION: { t = container_of(w, struct binder_transaction, work); } break; ...... }
if (!t) continue;
BUG_ON(t->buffer == NULL); if (t->buffer->target_node) { struct binder_node *target_node = t->buffer->target_node; tr.target.ptr = target_node->ptr; tr.cookie = target_node->cookie; ...... cmd = BR_TRANSACTION; } else { ...... } tr.code = t->code; tr.flags = t->flags; tr.sender_euid = t->sender_euid;
if (t->from) { struct task_struct *sender = t->from->proc->tsk; tr.sender_pid = task_tgid_nr_ns(sender, current->nsproxy->pid_ns); } else { tr.sender_pid = 0; }
tr.data_size = t->buffer->data_size; tr.offsets_size = t->buffer->offsets_size; tr.data.ptr.buffer = (void )t->buffer->data + proc->user_buffer_offset; tr.data.ptr.offsets = tr.data.ptr.buffer + ALIGN(t->buffer->data_size, sizeof(void ));
if (put_user(cmd, (uint32_t __user *)ptr)) return -EFAULT; ptr += sizeof(uint32_t); if (copy_to_user(ptr, &tr, sizeof(tr))) return -EFAULT; ptr += sizeof(tr);
......
list_del(&t->work.entry); t->buffer->allow_user_free = 1; if (cmd == BR_TRANSACTION && !(t->flags & TF_ONE_WAY)) { t->to_parent = thread->transaction_stack; t->to_thread = thread; thread->transaction_stack = t; } else { t->buffer->transaction = NULL; kfree(t); binder_stats.obj_deleted[BINDER_STAT_TRANSACTION]++; } break; }
done:
...... return 0; }
Service Manager被唤醒之后,就进入while循环开始处理事务了。这里wait_for_proc_work等于1,并且proc->todo不为空,所以从proc->todo列表中得到第一个工作项:
w = list_first_entry(&proc->todo, struct binder_work, entry);
从上面的描述中,我们知道,这个工作项的类型为BINDER_WORK_TRANSACTION,于是通过下面语句得到事务项:
t = container_of(w, struct binder_transaction, work);
接着就是把事务项t中的数据拷贝到本地局部变量struct binder_transaction_data tr中去了:
if (t->buffer->target_node) { struct binder_node *target_node = t->buffer->target_node; tr.target.ptr = target_node->ptr; tr.cookie = target_node->cookie; ...... cmd = BR_TRANSACTION; } else { ...... } tr.code = t->code; tr.flags = t->flags; tr.sender_euid = t->sender_euid;
if (t->from) { struct task_struct *sender = t->from->proc->tsk; tr.sender_pid = task_tgid_nr_ns(sender, current->nsproxy->pid_ns); } else { tr.sender_pid = 0; }
tr.data_size = t->buffer->data_size; tr.offsets_size = t->buffer->offsets_size; tr.data.ptr.buffer = (void )t->buffer->data + proc->user_buffer_offset; tr.data.ptr.offsets = tr.data.ptr.buffer + ALIGN(t->buffer->data_size, sizeof(void ));
这里有一个非常重要的地方,是Binder进程间通信机制的精髓所在:
tr.data.ptr.buffer = (void )t->buffer->data + proc->user_buffer_offset; tr.data.ptr.offsets = tr.data.ptr.buffer + ALIGN(t->buffer->data_size, sizeof(void ));
t->buffer->data所指向的地址是内核空间的,现在要把数据返回给Service Manager进程的用户空间,而Service Manager进程的用户空间是不能访问内核空间的数据的,所以这里要作一下处理。怎么处理呢?我们在学面向对象语言的时候,对象的拷贝有深拷贝和浅拷贝之分,深拷贝是把另外分配一块新内存,然后把原始对象的内容搬过去,浅拷贝是并没有为新对象分配一块新空间,而只是分配一个引用,而个引用指向原始对象。Binder机制用的是类似浅拷贝的方法,通过在用户空间分配一个虚拟地址,然后让这个用户空间虚拟地址与 t->buffer->data这个内核空间虚拟地址指向同一个物理地址,这样就可以实现浅拷贝了。怎么样用户空间和内核空间的虚拟地址同时指向同一个物理地址呢?请参考前面一篇文章[浅谈Service Manager成为Android进程间通信(IPC)机制Binder守护进程之路](https://www.androidos.net.cn/redirecturl.do?url=http%3A//blog.csdn.net/luoshengyang/article/details/6621566),那里有详细描述。这里只要将t->buffer->data加上一个偏移值proc->user_buffer_offset就可以得到t->buffer->data对应的用户空间虚拟地址了。调整了tr.data.ptr.buffer的值之后,不要忘记也要一起调整tr.data.ptr.offsets的值。
接着就是把tr的内容拷贝到用户传进来的缓冲区去了,指针ptr指向这个用户缓冲区的地址:
if (put_user(cmd, (uint32_t __user *)ptr)) return -EFAULT; ptr += sizeof(uint32_t); if (copy_to_user(ptr, &tr, sizeof(tr))) return -EFAULT; ptr += sizeof(tr);
这里可以看出,这里只是对作tr.data.ptr.bufferr和tr.data.ptr.offsets的内容作了浅拷贝。
最后,由于已经处理了这个事务,要把它从todo列表中删除:
list_del(&t->work.entry); t->buffer->allow_user_free = 1; if (cmd == BR_TRANSACTION && !(t->flags & TF_ONE_WAY)) { t->to_parent = thread->transaction_stack; t->to_thread = thread; thread->transaction_stack = t; } else { t->buffer->transaction = NULL; kfree(t); binder_stats.obj_deleted[BINDER_STAT_TRANSACTION]++; }
注意,这里的cmd == BR_TRANSACTION && !(t->flags & TF_ONE_WAY)为true,表明这个事务虽然在驱动程序中已经处理完了,但是它仍然要等待Service Manager完成之后,给驱动程序一个确认,也就是需要等待回复,于是把当前事务t放在thread->transaction_stack队列的头部:
t->to_parent = thread->transaction_stack; t->to_thread = thread; thread->transaction_stack = t;
如果cmd == BR_TRANSACTION && !(t->flags & TF_ONE_WAY)为false,那就不需要等待回复了,直接把事务t删掉。
这个while最后通过一个break跳了出来,最后返回到binder_ioctl函数中:
static long binder_ioctl(struct file filp, unsigned int cmd, unsigned long arg) { int ret; struct binder_proc proc = filp->private_data; struct binder_thread thread; unsigned int size = _IOC_SIZE(cmd); void __user ubuf = (void __user *)arg;
......
switch (cmd) { case BINDER_WRITE_READ: { struct binder_write_read bwr; if (size != sizeof(struct binder_write_read)) { ret = -EINVAL; goto err; } if (copy_from_user(&bwr, ubuf, sizeof(bwr))) { ret = -EFAULT; goto err; } ...... if (bwr.read_size > 0) { ret = binder_thread_read(proc, thread, (void __user *)bwr.read_buffer, bwr.read_size, &bwr.read_consumed, filp->f_flags & O_NONBLOCK); if (!list_empty(&proc->todo)) wake_up_interruptible(&proc->wait); if (ret < 0) { if (copy_to_user(ubuf, &bwr, sizeof(bwr))) ret = -EFAULT; goto err; } } ...... if (copy_to_user(ubuf, &bwr, sizeof(bwr))) { ret = -EFAULT; goto err; } break; } ...... default: ret = -EINVAL; goto err; } ret = 0; err: ...... return ret; }
从binder_thread_read返回来后,再看看proc->todo是否还有事务等待处理,如果是,就把睡眠在proc->wait队列的线程唤醒来处理。最后,把本地变量struct binder_write_read bwr的内容拷贝回到用户传进来的缓冲区中,就返回了。
这里就是返回到frameworks/base/cmds/servicemanager/binder.c文件中的binder_loop函数了:
void binder_loop(struct binder_state *bs, binder_handler func) { int res; struct binder_write_read bwr; unsigned readbuf[32];
bwr.write_size = 0; bwr.write_consumed = 0; bwr.write_buffer = 0;
readbuf[0] = BC_ENTER_LOOPER; binder_write(bs, readbuf, sizeof(unsigned));
for (;;) { bwr.read_size = sizeof(readbuf); bwr.read_consumed = 0; bwr.read_buffer = (unsigned) readbuf;
res = ioctl(bs->fd, BINDER_WRITE_READ, &bwr);
if (res < 0) { LOGE("binder_loop: ioctl failed (%s)\n", strerror(errno)); break; }
res = binder_parse(bs, 0, readbuf, bwr.read_consumed, func); if (res == 0) { LOGE("binder_loop: unexpected reply?!\n"); break; } if (res < 0) { LOGE("binder_loop: io error %d %s\n", res, strerror(errno)); break; } } }
返回来的数据都放在readbuf中,接着调用binder_parse进行解析:
int binder_parse(struct binder_state bs, struct binder_io bio, uint32_t ptr, uint32_t size, binder_handler func) { int r = 1; uint32_t end = ptr + (size / 4);
while (ptr < end) { uint32_t cmd = ptr++; ...... case BR_TRANSACTION: { struct binder_txn txn = (void ) ptr; if ((end - ptr) sizeof(uint32_t) < sizeof(struct binder_txn)) { LOGE("parse: txn too small!\n"); return -1; } binder_dump_txn(txn); if (func) { unsigned rdata[256/4]; struct binder_io msg; struct binder_io reply; int res;
bio_init(&reply, rdata, sizeof(rdata), 4); bio_init_from_txn(&msg, txn); res = func(bs, txn, &msg, &reply); binder_send_reply(bs, &reply, txn->data, res); } ptr += sizeof(*txn) / sizeof(uint32_t); break; } ...... default: LOGE("parse: OOPS %d\n", cmd); return -1; } }
return r; }
首先把从Binder驱动程序读出来的数据转换为一个struct binder_txn结构体,保存在txn本地变量中,struct binder_txn定义在frameworks/base/cmds/servicemanager/binder.h文件中:
struct binder_txn { void target; void cookie; uint32_t code; uint32_t flags;
uint32_t sender_pid; uint32_t sender_euid;
uint32_t data_size; uint32_t offs_size; void data; void offs; };
函数中还用到了另外一个数据结构struct binder_io,也是定义在frameworks/base/cmds/servicemanager/binder.h文件中:
struct binder_io { char data; / pointer to read/write from / uint32_t offs; / array of offsets / uint32_t data_avail; / bytes available in data buffer / uint32_t offs_avail; / entries available in offsets array /
char data0; / start of data buffer / uint32_t offs0; / start of offsets buffer / uint32_t flags; uint32_t unused; };
接着往下看,函数调bio_init来初始化reply变量:
void bio_init(struct binder_io bio, void data, uint32_t maxdata, uint32_t maxoffs) { uint32_t n = maxoffs * sizeof(uint32_t);
if (n > maxdata) { bio->flags = BIO_F_OVERFLOW; bio->data_avail = 0; bio->offs_avail = 0; return; }
bio->data = bio->data0 = data + n; bio->offs = bio->offs0 = data; bio->data_avail = maxdata - n; bio->offs_avail = maxoffs; bio->flags = 0; }
接着又调用bio_init_from_txn来初始化msg变量:
void bio_init_from_txn(struct binder_io bio, struct binder_txn txn) { bio->data = bio->data0 = txn->data; bio->offs = bio->offs0 = txn->offs; bio->data_avail = txn->data_size; bio->offs_avail = txn->offs_size / 4; bio->flags = BIO_F_SHARED; }
最后,真正进行处理的函数是从参数中传进来的函数指针func,这里就是定义在frameworks/base/cmds/servicemanager/service_manager.c文件中的svcmgr_handler函数:
int svcmgr_handler(struct binder_state bs, struct binder_txn txn, struct binder_io msg, struct binder_io reply) { struct svcinfo si; uint16_t s; unsigned len; void *ptr; uint32_t strict_policy;
if (txn->target != svcmgr_handle) return -1;
// Equivalent to Parcel::enforceInterface(), reading the RPC // header with the strict mode policy mask and the interface name. // Note that we ignore the strict_policy and don't propagate it // further (since we do no outbound RPCs anyway). strict_policy = bio_get_uint32(msg); s = bio_get_string16(msg, &len); if ((len != (sizeof(svcmgr_id) / 2)) || memcmp(svcmgr_id, s, sizeof(svcmgr_id))) { fprintf(stderr,"invalid id %s\n", str8(s)); return -1; }
switch(txn->code) { ...... case SVC_MGR_ADD_SERVICE: s = bio_get_string16(msg, &len); ptr = bio_get_ref(msg); if (do_add_service(bs, s, len, ptr, txn->sender_euid)) return -1; break; ...... }
bio_put_uint32(reply, 0); return 0; }
回忆一下,在BpServiceManager::addService时,传给Binder驱动程序的参数为:
writeInt32(IPCThreadState::self()->getStrictModePolicy() | STRICT_MODE_PENALTY_GATHER); writeString16("android.os.IServiceManager"); writeString16("media.player"); writeStrongBinder(new MediaPlayerService());
这里的语句:
strict_policy = bio_get_uint32(msg); s = bio_get_string16(msg, &len); s = bio_get_string16(msg, &len); ptr = bio_get_ref(msg);
就是依次把它们读取出来了,这里,我们只要看一下bio_get_ref的实现。先看一个数据结构struct binder_obj的定义:
struct binder_object { uint32_t type; uint32_t flags; void pointer; void cookie; };
这个结构体其实就是对应struct flat_binder_obj的。
接着看bio_get_ref实现:
void bio_get_ref(struct binder_io bio) { struct binder_object *obj;
obj = _bio_get_obj(bio); if (!obj) return 0;
if (obj->type == BINDER_TYPE_HANDLE) return obj->pointer;
return 0; }
_bio_get_obj这个函数就不跟进去看了,它的作用就是从binder_io中取得第一个还没取获取过的binder_object。在这个场景下,就是我们最开始传过来代表MediaPlayerService的flat_binder_obj了,这个原始的flat_binder_obj的type为BINDER_TYPE_BINDER,binder为指向MediaPlayerService的弱引用的地址。在前面我们说过,在Binder驱动驱动程序里面,会把这个flat_binder_obj的type改为BINDER_TYPE_HANDLE,handle改为一个句柄值。这里的handle值就等于obj->pointer的值。
回到svcmgr_handler函数,调用do_add_service进一步处理:
int do_add_service(struct binder_state bs, uint16_t s, unsigned len, void ptr, unsigned uid) { struct svcinfo si; // LOGI("add_service('%s',%p) uid=%d\n", str8(s), ptr, uid);
if (!ptr || (len == 0) || (len > 127)) return -1;
if (!svc_can_register(uid, s)) { LOGE("add_service('%s',%p) uid=%d - PERMISSION DENIED\n", str8(s), ptr, uid); return -1; }
si = find_svc(s, len); if (si) { if (si->ptr) { LOGE("add_service('%s',%p) uid=%d - ALREADY REGISTERED\n", str8(s), ptr, uid); return -1; } si->ptr = ptr; } else { si = malloc(sizeof(si) + (len + 1) sizeof(uint16_t)); if (!si) { LOGE("add_service('%s',%p) uid=%d - OUT OF MEMORY\n", str8(s), ptr, uid); return -1; } si->ptr = ptr; si->len = len; memcpy(si->name, s, (len + 1) * sizeof(uint16_t)); si->name[len] = '\0'; si->death.func = svcinfo_death; si->death.ptr = si; si->next = svclist; svclist = si; }
binder_acquire(bs, ptr); binder_link_to_death(bs, ptr, &si->death); return 0; }
这个函数的实现很简单,就是把MediaPlayerService这个Binder实体的引用写到一个struct svcinfo结构体中,主要是它的名称和句柄值,然后插入到链接svclist的头部去。这样,Client来向Service Manager查询服务接口时,只要给定服务名称,Service Manger就可以返回相应的句柄值了。
这个函数执行完成后,返回到svcmgr_handler函数,函数的最后,将一个错误码0写到reply变量中去,表示一切正常:
bio_put_uint32(reply, 0);
svcmgr_handler函数执行完成后,返回到binder_parse函数,执行下面语句:
binder_send_reply(bs, &reply, txn->data, res);
我们看一下binder_send_reply的实现,从函数名就可以猜到它要做什么了,告诉Binder驱动程序,它完成了Binder驱动程序交给它的任务了。
void binder_send_reply(struct binder_state bs, struct binder_io reply, void buffer_to_free, int status) { struct { uint32_t cmd_free; void buffer; uint32_t cmd_reply; struct binder_txn txn; } attribute((packed)) data;
data.cmd_free = BC_FREE_BUFFER; data.buffer = buffer_to_free; data.cmd_reply = BC_REPLY; data.txn.target = 0; data.txn.cookie = 0; data.txn.code = 0; if (status) { data.txn.flags = TF_STATUS_CODE; data.txn.data_size = sizeof(int); data.txn.offs_size = 0; data.txn.data = &status; data.txn.offs = 0; } else { data.txn.flags = 0; data.txn.data_size = reply->data - reply->data0; data.txn.offs_size = ((char) reply->offs) - ((char) reply->offs0); data.txn.data = reply->data0; data.txn.offs = reply->offs0; } binder_write(bs, &data, sizeof(data)); }
从这里可以看出,binder_send_reply告诉Binder驱动程序执行BC_FREE_BUFFER和BC_REPLY命令,前者释放之前在binder_transaction分配的空间,地址为buffer_to_free,buffer_to_free这个地址是Binder驱动程序把自己在内核空间用的地址转换成用户空间地址再传给Service Manager的,所以Binder驱动程序拿到这个地址后,知道怎么样释放这个空间;后者告诉MediaPlayerService,它的addService操作已经完成了,错误码是0,保存在data.txn.data中。
再来看binder_write函数:
int binder_write(struct binder_state bs, void data, unsigned len) { struct binder_write_read bwr; int res; bwr.write_size = len; bwr.write_consumed = 0; bwr.write_buffer = (unsigned) data; bwr.read_size = 0; bwr.read_consumed = 0; bwr.read_buffer = 0; res = ioctl(bs->fd, BINDER_WRITE_READ, &bwr); if (res < 0) { fprintf(stderr,"binder_write: ioctl failed (%s)\n", strerror(errno)); } return res; }
这里可以看出,只有写操作,没有读操作,即read_size为0。
这里又是一个ioctl的BINDER_WRITE_READ操作。直入到驱动程序的binder_ioctl函数后,执行BINDER_WRITE_READ命令,这里就不累述了。
最后,从binder_ioctl执行到binder_thread_write函数,我们首先看第一个命令BC_FREE_BUFFER:
int binder_thread_write(struct binder_proc proc, struct binder_thread thread, void __user buffer, int size, signed long consumed) { uint32_t cmd; void user ptr = buffer + consumed; void user *end = buffer + size;
while (ptr < end && thread->return_error == BR_OK) { if (get_user(cmd, (uint32_t user *)ptr)) return -EFAULT; ptr += sizeof(uint32_t); if (_IOC_NR(cmd) < ARRAY_SIZE(binder_stats.bc)) { binder_stats.bc[_IOC_NR(cmd)]++; proc->stats.bc[_IOC_NR(cmd)]++; thread->stats.bc[_IOC_NR(cmd)]++; } switch (cmd) { ...... case BC_FREE_BUFFER: { void user data_ptr; struct binder_buffer buffer;
if (get_user(data_ptr, (void __user )ptr)) return -EFAULT; ptr += sizeof(void *);
buffer = binder_buffer_lookup(proc, data_ptr); if (buffer == NULL) { binder_user_error("binder: %d:%d " "BC_FREE_BUFFER u%p no match\n", proc->pid, thread->pid, data_ptr); break; } if (!buffer->allow_user_free) { binder_user_error("binder: %d:%d " "BC_FREE_BUFFER u%p matched " "unreturned buffer\n", proc->pid, thread->pid, data_ptr); break; } if (binder_debug_mask & BINDER_DEBUG_FREE_BUFFER) printk(KERN_INFO "binder: %d:%d BC_FREE_BUFFER u%p found buffer %d for %s transaction\n", proc->pid, thread->pid, data_ptr, buffer->debug_id, buffer->transaction ? "active" : "finished");
if (buffer->transaction) { buffer->transaction->buffer = NULL; buffer->transaction = NULL; } if (buffer->async_transaction && buffer->target_node) { BUG_ON(!buffer->target_node->has_async_transaction); if (list_empty(&buffer->target_node->async_todo)) buffer->target_node->has_async_transaction = 0; else list_move_tail(buffer->target_node->async_todo.next, &thread->todo); } binder_transaction_buffer_release(proc, buffer, NULL); binder_free_buf(proc, buffer); break; }
...... *consumed = ptr - buffer; } return 0; }
首先通过看这个语句:
get_user(data_ptr, (void __user )ptr)
这个是获得要删除的Buffer的用户空间地址,接着通过下面这个语句来找到这个地址对应的struct binder_buffer信息:
buffer = binder_buffer_lookup(proc, data_ptr);
因为这个空间是前面在binder_transaction里面分配的,所以这里一定能找到。
最后,就可以释放这块内存了:
binder_transaction_buffer_release(proc, buffer, NULL); binder_free_buf(proc, buffer);
再来看另外一个命令BC_REPLY:
int binder_thread_write(struct binder_proc proc, struct binder_thread thread, void __user buffer, int size, signed long consumed) { uint32_t cmd; void user ptr = buffer + consumed; void user *end = buffer + size;
while (ptr < end && thread->return_error == BR_OK) { if (get_user(cmd, (uint32_t __user *)ptr)) return -EFAULT; ptr += sizeof(uint32_t); if (_IOC_NR(cmd) < ARRAY_SIZE(binder_stats.bc)) { binder_stats.bc[_IOC_NR(cmd)]++; proc->stats.bc[_IOC_NR(cmd)]++; thread->stats.bc[_IOC_NR(cmd)]++; } switch (cmd) { ...... case BC_TRANSACTION: case BC_REPLY: { struct binder_transaction_data tr;
if (copy_from_user(&tr, ptr, sizeof(tr))) return -EFAULT; ptr += sizeof(tr); binder_transaction(proc, thread, &tr, cmd == BC_REPLY); break; }
...... *consumed = ptr - buffer; } return 0; }
又再次进入到binder_transaction函数:
static void binder_transaction(struct binder_proc proc, struct binder_thread thread, struct binder_transaction_data tr, int reply) { struct binder_transaction t; struct binder_work tcomplete; size_t offp, off_end; struct binder_proc target_proc; struct binder_thread target_thread = NULL; struct binder_node target_node = NULL; struct list_head target_list; wait_queue_head_t target_wait; struct binder_transaction in_reply_to = NULL; struct binder_transaction_log_entry e; uint32_t return_error;
......
if (reply) { in_reply_to = thread->transaction_stack; if (in_reply_to == NULL) { ...... return_error = BR_FAILED_REPLY; goto err_empty_call_stack; } binder_set_nice(in_reply_to->saved_priority); if (in_reply_to->to_thread != thread) { ....... goto err_bad_call_stack; } thread->transaction_stack = in_reply_to->to_parent; target_thread = in_reply_to->from; if (target_thread == NULL) { return_error = BR_DEAD_REPLY; goto err_dead_binder; } if (target_thread->transaction_stack != in_reply_to) { ...... return_error = BR_FAILED_REPLY; in_reply_to = NULL; target_thread = NULL; goto err_dead_binder; } target_proc = target_thread->proc; } else { ...... } if (target_thread) { e->to_thread = target_thread->pid; target_list = &target_thread->todo; target_wait = &target_thread->wait; } else { ...... }
/ TODO: reuse incoming transaction for reply / t = kzalloc(sizeof(*t), GFP_KERNEL); if (t == NULL) { return_error = BR_FAILED_REPLY; goto err_alloc_t_failed; }
tcomplete = kzalloc(sizeof(*tcomplete), GFP_KERNEL); if (tcomplete == NULL) { return_error = BR_FAILED_REPLY; goto err_alloc_tcomplete_failed; }
if (!reply && !(tr->flags & TF_ONE_WAY)) t->from = thread; else t->from = NULL; t->sender_euid = proc->tsk->cred->euid; t->to_proc = target_proc; t->to_thread = target_thread; t->code = tr->code; t->flags = tr->flags; t->priority = task_nice(current); t->buffer = binder_alloc_buf(target_proc, tr->data_size, tr->offsets_size, !reply && (t->flags & TF_ONE_WAY)); if (t->buffer == NULL) { return_error = BR_FAILED_REPLY; goto err_binder_alloc_buf_failed; } t->buffer->allow_user_free = 0; t->buffer->debug_id = t->debug_id; t->buffer->transaction = t; t->buffer->target_node = target_node; if (target_node) binder_inc_node(target_node, 1, 0, NULL);
offp = (size_t )(t->buffer->data + ALIGN(tr->data_size, sizeof(void )));
if (copy_from_user(t->buffer->data, tr->data.ptr.buffer, tr->data_size)) { binder_user_error("binder: %d:%d got transaction with invalid " "data ptr\n", proc->pid, thread->pid); return_error = BR_FAILED_REPLY; goto err_copy_data_failed; } if (copy_from_user(offp, tr->data.ptr.offsets, tr->offsets_size)) { binder_user_error("binder: %d:%d got transaction with invalid " "offsets ptr\n", proc->pid, thread->pid); return_error = BR_FAILED_REPLY; goto err_copy_data_failed; }
......
if (reply) { BUG_ON(t->buffer->async_transaction != 0); binder_pop_transaction(target_thread, in_reply_to); } else if (!(t->flags & TF_ONE_WAY)) { ...... } else { ...... } t->work.type = BINDER_WORK_TRANSACTION; list_add_tail(&t->work.entry, target_list); tcomplete->type = BINDER_WORK_TRANSACTION_COMPLETE; list_add_tail(&tcomplete->entry, &thread->todo); if (target_wait) wake_up_interruptible(target_wait); return; ...... }
注意,这里的reply为1,我们忽略掉其它无关代码。
前面Service Manager正在binder_thread_read函数中被MediaPlayerService启动后进程唤醒后,在最后会把当前处理完的事务放在thread->transaction_stack中:
if (cmd == BR_TRANSACTION && !(t->flags & TF_ONE_WAY)) { t->to_parent = thread->transaction_stack; t->to_thread = thread; thread->transaction_stack = t; }
所以,这里,首先是把它这个binder_transaction取回来,并且放在本地变量in_reply_to中:
in_reply_to = thread->transaction_stack;
接着就可以通过in_reply_to得到最终发出这个事务请求的线程和进程:
target_thread = in_reply_to->from; target_proc = target_thread->proc;
然后得到target_list和target_wait:
target_list = &target_thread->todo; target_wait = &target_thread->wait;
下面这一段代码:
/ TODO: reuse incoming transaction for reply / t = kzalloc(sizeof(*t), GFP_KERNEL); if (t == NULL) { return_error = BR_FAILED_REPLY; goto err_alloc_t_failed; }
tcomplete = kzalloc(sizeof(*tcomplete), GFP_KERNEL); if (tcomplete == NULL) { return_error = BR_FAILED_REPLY; goto err_alloc_tcomplete_failed; }
if (!reply && !(tr->flags & TF_ONE_WAY)) t->from = thread; else t->from = NULL; t->sender_euid = proc->tsk->cred->euid; t->to_proc = target_proc; t->to_thread = target_thread; t->code = tr->code; t->flags = tr->flags; t->priority = task_nice(current); t->buffer = binder_alloc_buf(target_proc, tr->data_size, tr->offsets_size, !reply && (t->flags & TF_ONE_WAY)); if (t->buffer == NULL) { return_error = BR_FAILED_REPLY; goto err_binder_alloc_buf_failed; } t->buffer->allow_user_free = 0; t->buffer->debug_id = t->debug_id; t->buffer->transaction = t; t->buffer->target_node = target_node; if (target_node) binder_inc_node(target_node, 1, 0, NULL);
offp = (size_t )(t->buffer->data + ALIGN(tr->data_size, sizeof(void )));
if (copy_from_user(t->buffer->data, tr->data.ptr.buffer, tr->data_size)) { binder_user_error("binder: %d:%d got transaction with invalid " "data ptr\n", proc->pid, thread->pid); return_error = BR_FAILED_REPLY; goto err_copy_data_failed; } if (copy_from_user(offp, tr->data.ptr.offsets, tr->offsets_size)) { binder_user_error("binder: %d:%d got transaction with invalid " "offsets ptr\n", proc->pid, thread->pid); return_error = BR_FAILED_REPLY; goto err_copy_data_failed; }
我们在前面已经分析过了,这里不再重复。但是有一点要注意的是,这里target_node为NULL,因此,t->buffer->target_node也为NULL。
函数本来有一个for循环,用来处理数据中的Binder对象,这里由于没有Binder对象,所以就略过了。到了下面这句代码:
binder_pop_transaction(target_thread, in_reply_to);
我们看看做了什么事情:
static void binder_pop_transaction( struct binder_thread target_thread, struct binder_transaction t) { if (target_thread) { BUG_ON(target_thread->transaction_stack != t); BUG_ON(target_thread->transaction_stack->from != target_thread); target_thread->transaction_stack = target_thread->transaction_stack->from_parent; t->from = NULL; } t->need_reply = 0; if (t->buffer) t->buffer->transaction = NULL; kfree(t); binder_stats.obj_deleted[BINDER_STAT_TRANSACTION]++; }
由于到了这里,已经不需要in_reply_to这个transaction了,就把它删掉。
回到binder_transaction函数:
t->work.type = BINDER_WORK_TRANSACTION; list_add_tail(&t->work.entry, target_list); tcomplete->type = BINDER_WORK_TRANSACTION_COMPLETE; list_add_tail(&tcomplete->entry, &thread->todo);
和前面一样,分别把t和tcomplete分别放在target_list和thread->todo队列中,这里的target_list指的就是最初调用IServiceManager::addService的MediaPlayerService的Server主线程的的thread->todo队列了,而thread->todo指的是Service Manager中用来回复IServiceManager::addService请求的线程。
最后,唤醒等待在target_wait队列上的线程了,就是最初调用IServiceManager::addService的MediaPlayerService的Server主线程了,它最后在binder_thread_read函数中睡眠在thread->wait上,就是这里的target_wait了:
if (target_wait) wake_up_interruptible(target_wait);
这样,Service Manger回复调用IServiceManager::addService请求就算完成了,重新回到frameworks/base/cmds/servicemanager/binder.c文件中的binder_loop函数等待下一个Client请求的到来。事实上,Service Manger回到binder_loop函数再次执行ioctl函数时候,又会再次进入到binder_thread_read函数。这时个会发现thread->todo不为空,这是因为刚才我们调用了:
list_add_tail(&tcomplete->entry, &thread->todo);
把一个工作项tcompelete放在了在thread->todo中,这个tcompelete的type为BINDER_WORK_TRANSACTION_COMPLETE,因此,Binder驱动程序会执行下面操作:
switch (w->type) { case BINDER_WORK_TRANSACTION_COMPLETE: { cmd = BR_TRANSACTION_COMPLETE; if (put_user(cmd, (uint32_t __user *)ptr)) return -EFAULT; ptr += sizeof(uint32_t);
list_del(&w->entry); kfree(w);
} break; ...... }
binder_loop函数执行完这个ioctl调用后,才会在下一次调用ioctl进入到Binder驱动程序进入休眠状态,等待下一次Client的请求。
上面讲到调用IServiceManager::addService的MediaPlayerService的Server主线程被唤醒了,于是,重新执行binder_thread_read函数:
static int binder_thread_read(struct binder_proc proc, struct binder_thread thread, void __user buffer, int size, signed long consumed, int non_block) { void user ptr = buffer + consumed; void user *end = buffer + size;
int ret = 0; int wait_for_proc_work;
if (consumed == 0) { if (put_user(BR_NOOP, (uint32_t __user )ptr)) return -EFAULT; ptr += sizeof(uint32_t); }
retry: wait_for_proc_work = thread->transaction_stack == NULL && list_empty(&thread->todo);
......
if (wait_for_proc_work) { ...... } else { if (non_block) { if (!binder_has_thread_work(thread)) ret = -EAGAIN; } else ret = wait_event_interruptible(thread->wait, binder_has_thread_work(thread)); }
......
while (1) { uint32_t cmd; struct binder_transaction_data tr; struct binder_work w; struct binder_transaction t = NULL;
if (!list_empty(&thread->todo)) w = list_first_entry(&thread->todo, struct binder_work, entry); else if (!list_empty(&proc->todo) && wait_for_proc_work) w = list_first_entry(&proc->todo, struct binder_work, entry); else { if (ptr - buffer == 4 && !(thread->looper & BINDER_LOOPER_STATE_NEED_RETURN)) / no data added / goto retry; break; }
......
switch (w->type) { case BINDER_WORK_TRANSACTION: { t = container_of(w, struct binder_transaction, work); } break; ...... }
if (!t) continue;
BUG_ON(t->buffer == NULL); if (t->buffer->target_node) { ...... } else { tr.target.ptr = NULL; tr.cookie = NULL; cmd = BR_REPLY; } tr.code = t->code; tr.flags = t->flags; tr.sender_euid = t->sender_euid;
if (t->from) { ...... } else { tr.sender_pid = 0; }
tr.data_size = t->buffer->data_size; tr.offsets_size = t->buffer->offsets_size; tr.data.ptr.buffer = (void )t->buffer->data + proc->user_buffer_offset; tr.data.ptr.offsets = tr.data.ptr.buffer + ALIGN(t->buffer->data_size, sizeof(void ));
if (put_user(cmd, (uint32_t __user *)ptr)) return -EFAULT; ptr += sizeof(uint32_t); if (copy_to_user(ptr, &tr, sizeof(tr))) return -EFAULT; ptr += sizeof(tr);
......
list_del(&t->work.entry); t->buffer->allow_user_free = 1; if (cmd == BR_TRANSACTION && !(t->flags & TF_ONE_WAY)) { ...... } else { t->buffer->transaction = NULL; kfree(t); binder_stats.obj_deleted[BINDER_STAT_TRANSACTION]++; } break; }
done: ...... return 0; }
在while循环中,从thread->todo得到w,w->type为BINDER_WORK_TRANSACTION,于是,得到t。从上面可以知道,Service Manager反回了一个0回来,写在t->buffer->data里面,现在把t->buffer->data加上proc->user_buffer_offset,得到用户空间地址,保存在tr.data.ptr.buffer里面,这样用户空间就可以访问这个返回码了。由于cmd不等于BR_TRANSACTION,这时就可以把t删除掉了,因为以后都不需要用了。
执行完这个函数后,就返回到binder_ioctl函数,执行下面语句,把数据返回给用户空间:
if (copy_to_user(ubuf, &bwr, sizeof(bwr))) { ret = -EFAULT; goto err; }
接着返回到用户空间IPCThreadState::talkWithDriver函数,最后返回到IPCThreadState::waitForResponse函数,最终执行到下面语句:
status_t IPCThreadState::waitForResponse(Parcel reply, status_t acquireResult) { int32_t cmd; int32_t err;
while (1) { if ((err=talkWithDriver()) < NO_ERROR) break;
......
cmd = mIn.readInt32();
......
switch (cmd) { ...... case BR_REPLY: { binder_transaction_data tr; err = mIn.read(&tr, sizeof(tr)); LOG_ASSERT(err == NO_ERROR, "Not enough command data for brREPLY"); if (err != NO_ERROR) goto finish;
if (reply) { if ((tr.flags & TF_STATUS_CODE) == 0) { reply->ipcSetDataReference( reinterpret_cast<const uint8_t>(tr.data.ptr.buffer), tr.data_size, reinterpret_cast<const size_t>(tr.data.ptr.offsets), tr.offsets_size/sizeof(size_t), freeBuffer, this); } else { ...... } } else { ...... } } goto finish;
...... } }
finish: ...... return err; }
注意,这里的tr.flags等于0,这个是在上面的binder_send_reply函数里设置的。最终把结果保存在reply了:
reply->ipcSetDataReference( reinterpret_cast<const uint8_t>(tr.data.ptr.buffer), tr.data_size, reinterpret_cast<const size_t>(tr.data.ptr.offsets), tr.offsets_size/sizeof(size_t), freeBuffer, this);
这个函数我们就不看了,有兴趣的读者可以研究一下。
从这里层层返回,最后回到MediaPlayerService::instantiate函数中。
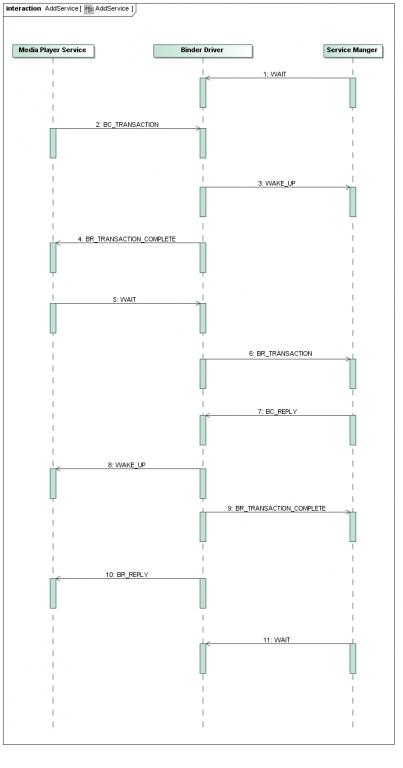
至此,IServiceManager::addService终于执行完毕了。这个过程非常复杂,但是如果我们能够深刻地理解这一过程,将能很好地理解Binder机制的设计思想和实现过程。这里,对IServiceManager::addService过程中MediaPlayerService、ServiceManager和BinderDriver之间的交互作一个小结:
回到frameworks/base/media/mediaserver/main_mediaserver.cpp文件中的main函数,接下去还要执行下面两个函数:
ProcessState::self()->startThreadPool(); IPCThreadState::self()->joinThreadPool();
首先看ProcessState::startThreadPool函数的实现:
void ProcessState::startThreadPool() { AutoMutex _l(mLock); if (!mThreadPoolStarted) { mThreadPoolStarted = true; spawnPooledThread(true); } }
这里调用spwanPooledThread:
void ProcessState::spawnPooledThread(bool isMain)
{
if (mThreadPoolStarted) {
int32_t s = android_atomic_add(1, &mThreadPoolSeq);
char buf[32];
sprintf(buf, "Binder Thread #%d", s);
LOGV("Spawning new pooled thread, name=%s\n", buf);
sp
这里主要是创建一个线程,PoolThread继续Thread类,Thread类定义在frameworks/base/libs/utils/Threads.cpp文件中,其run函数最终调用子类的threadLoop函数,这里即为PoolThread::threadLoop函数:
virtual bool threadLoop() { IPCThreadState::self()->joinThreadPool(mIsMain); return false; }
这里和frameworks/base/media/mediaserver/main_mediaserver.cpp文件中的main函数一样,最终都是调用了IPCThreadState::joinThreadPool函数,它们的区别是,一个参数是true,一个是默认值false。我们来看一下这个函数的实现:
void IPCThreadState::joinThreadPool(bool isMain) { LOG_THREADPOOL("*** THREAD %p (PID %d) IS JOINING THE THREAD POOL\n", (void)pthread_self(), getpid());
mOut.writeInt32(isMain ? BC_ENTER_LOOPER : BC_REGISTER_LOOPER);
......
status_t result; do { int32_t cmd;
.......
// now get the next command to be processed, waiting if necessary result = talkWithDriver(); if (result >= NO_ERROR) { size_t IN = mIn.dataAvail(); if (IN < sizeof(int32_t)) continue; cmd = mIn.readInt32(); ...... }
result = executeCommand(cmd); }
...... } while (result != -ECONNREFUSED && result != -EBADF);
.......
mOut.writeInt32(BC_EXIT_LOOPER); talkWithDriver(false); }
这个函数最终是在一个无穷循环中,通过调用talkWithDriver函数来和Binder驱动程序进行交互,实际上就是调用talkWithDriver来等待Client的请求,然后再调用executeCommand来处理请求,而在executeCommand函数中,最终会调用BBinder::transact来真正处理Client的请求:
status_t IPCThreadState::executeCommand(int32_t cmd) { BBinder obj; RefBase::weakref_type refs; status_t result = NO_ERROR;
switch (cmd) { ......
case BR_TRANSACTION: { binder_transaction_data tr; result = mIn.read(&tr, sizeof(tr));
......
Parcel reply;
......
if (tr.target.ptr) {
sp
} else { const status_t error = the_context_object->transact(tr.code, buffer, &reply, tr.flags); if (error < NO_ERROR) reply.setError(error); }
...... } break;
....... }
if (result != NO_ERROR) { mLastError = result; }
return result; }
接下来再看一下BBinder::transact的实现:
status_t BBinder::transact( uint32_t code, const Parcel& data, Parcel* reply, uint32_t flags) { data.setDataPosition(0);
status_t err = NO_ERROR; switch (code) { case PING_TRANSACTION: reply->writeInt32(pingBinder()); break; default: err = onTransact(code, data, reply, flags); break; }
if (reply != NULL) { reply->setDataPosition(0); }
return err; }
最终会调用onTransact函数来处理。在这个场景中,BnMediaPlayerService继承了BBinder类,并且重载了onTransact函数,因此,这里实际上是调用了BnMediaPlayerService::onTransact函数,这个函数定义在frameworks/base/libs/media/libmedia/IMediaPlayerService.cpp文件中:
status_t BnMediaPlayerService::onTransact( uint32_t code, const Parcel& data, Parcel* reply, uint32_t flags) { switch(code) { case CREATE_URL: { ...... } break; case CREATE_FD: { ...... } break; case DECODE_URL: { ...... } break; case DECODE_FD: { ...... } break; case CREATE_MEDIA_RECORDER: { ...... } break; case CREATE_METADATA_RETRIEVER: { ...... } break; case GET_OMX: { ...... } break; default: return BBinder::onTransact(code, data, reply, flags); } }
至此,我们就以MediaPlayerService为例,完整地介绍了Android系统进程间通信Binder机制中的Server启动过程。Server启动起来之后,就会在一个无穷循环中等待Client的请求了。在下一篇文章中,我们将介绍Client如何通过Service Manager远程接口来获得Server远程接口,进而调用Server远程接口来使用Server提供的服务,敬请关注。
**老罗的新浪微博:[http://weibo.com/shengyangluo](https://www.androidos.net.cn/redirecturl.do?url=http%3A//weibo.com/shengyangluo),欢迎关注!** 京东创始人刘强东和其妻子章泽天最近成为了互联网舆论关注的焦点。有关他们“移民美国”和在美国购买豪宅的传言在互联网上广泛传播。然而,京东官方通过微博发言人发布的消息澄清了这些传言,称这些言论纯属虚假信息和蓄意捏造。
日前,据博主“@超能数码君老周”爆料,国内三大运营商中国移动、中国电信和中国联通预计将集体采购百万台规模的华为Mate60系列手机。
据报道,荷兰半导体设备公司ASML正看到美国对华遏制政策的负面影响。阿斯麦(ASML)CEO彼得·温宁克在一档电视节目中分享了他对中国大陆问题以及该公司面临的出口管制和保护主义的看法。彼得曾在多个场合表达了他对出口管制以及中荷经济关系的担忧。
今年早些时候,抖音悄然上线了一款名为“青桃”的 App,Slogan 为“看见你的热爱”,根据应用介绍可知,“青桃”是一个属于年轻人的兴趣知识视频平台,由抖音官方出品的中长视频关联版本,整体风格有些类似B站。
日前,威马汽车首席数据官梅松林转发了一份“世界各国地区拥车率排行榜”,同时,他发文表示:中国汽车普及率低于非洲国家尼日利亚,每百户家庭仅17户有车。意大利世界排名第一,每十户中九户有车。
近日,一项新的研究发现,维生素 C 和 E 等抗氧化剂会激活一种机制,刺激癌症肿瘤中新血管的生长,帮助它们生长和扩散。
据媒体援引消息人士报道,苹果公司正在测试使用3D打印技术来生产其智能手表的钢质底盘。消息传出后,3D系统一度大涨超10%,不过截至周三收盘,该股涨幅回落至2%以内。
9月2日,坐拥千万粉丝的网红主播“秀才”账号被封禁,在社交媒体平台上引发热议。平台相关负责人表示,“秀才”账号违反平台相关规定,已封禁。据知情人士透露,秀才近期被举报存在违法行为,这可能是他被封禁的部分原因。据悉,“秀才”年龄39岁,是安徽省亳州市蒙城县人,抖音网红,粉丝数量超1200万。他曾被称为“中老年...
9月3日消息,亚马逊的一些股东,包括持有该公司股票的一家养老基金,日前对亚马逊、其创始人贝索斯和其董事会提起诉讼,指控他们在为 Project Kuiper 卫星星座项目购买发射服务时“违反了信义义务”。
据消息,为推广自家应用,苹果现推出了一个名为“Apps by Apple”的网站,展示了苹果为旗下产品(如 iPhone、iPad、Apple Watch、Mac 和 Apple TV)开发的各种应用程序。
特斯拉本周在美国大幅下调Model S和X售价,引发了该公司一些最坚定支持者的不满。知名特斯拉多头、未来基金(Future Fund)管理合伙人加里·布莱克发帖称,降价是一种“短期麻醉剂”,会让潜在客户等待进一步降价。
据外媒9月2日报道,荷兰半导体设备制造商阿斯麦称,尽管荷兰政府颁布的半导体设备出口管制新规9月正式生效,但该公司已获得在2023年底以前向中国运送受限制芯片制造机器的许可。
近日,根据美国证券交易委员会的文件显示,苹果卫星服务提供商 Globalstar 近期向马斯克旗下的 SpaceX 支付 6400 万美元(约 4.65 亿元人民币)。用于在 2023-2025 年期间,发射卫星,进一步扩展苹果 iPhone 系列的 SOS 卫星服务。
据报道,马斯克旗下社交平台𝕏(推特)日前调整了隐私政策,允许 𝕏 使用用户发布的信息来训练其人工智能(AI)模型。新的隐私政策将于 9 月 29 日生效。新政策规定,𝕏可能会使用所收集到的平台信息和公开可用的信息,来帮助训练 𝕏 的机器学习或人工智能模型。
9月2日,荣耀CEO赵明在采访中谈及华为手机回归时表示,替老同事们高兴,觉得手机行业,由于华为的回归,让竞争充满了更多的可能性和更多的魅力,对行业来说也是件好事。
《自然》30日发表的一篇论文报道了一个名为Swift的人工智能(AI)系统,该系统驾驶无人机的能力可在真实世界中一对一冠军赛里战胜人类对手。
近日,非营利组织纽约真菌学会(NYMS)发出警告,表示亚马逊为代表的电商平台上,充斥着各种AI生成的蘑菇觅食科普书籍,其中存在诸多错误。
社交媒体平台𝕏(原推特)新隐私政策提到:“在您同意的情况下,我们可能出于安全、安保和身份识别目的收集和使用您的生物识别信息。”
2023年德国柏林消费电子展上,各大企业都带来了最新的理念和产品,而高端化、本土化的中国产品正在不断吸引欧洲等国际市场的目光。
罗永浩日前在直播中吐槽苹果即将推出的 iPhone 新品,具体内容为:“以我对我‘子公司’的了解,我认为 iPhone 15 跟 iPhone 14 不会有什么区别的,除了序(列)号变了,这个‘不要脸’的东西,这个‘臭厨子’。