Split lock 是 CPU 为了支持跨 cache line 进行原子内存访问而支持的内存总线锁。
有些处理器比如 ARM、RISC-V 不允许未对齐的内存访问,不会产生跨 cache line 的原子访问,所以不会产生 split lock,而 X86 是支持的。
split lock 对开发者来说是很方便的,因为不需要考虑内存不对齐访问的问题,但是这同时也是有代价的:一个产生 split lock 的指令会独占内存总线大约 1000 个时钟周期,对比正常情况下的 ADD 指令约只需要小于 10 个时钟周期,锁住内存总线导致其他 CPU 无法访问内存会严重影响系统性能。
因此 split lock 的检测与处理就非常重要,现在的 CPU 支持检测能力,检测到如果在内核态会直接 panic,在用户态则会尝试主动 sleep 来降低 split lock 产生的频率,或者 kill 用户态进程,进而缓解对内存总线的争抢。
在引入了虚拟化后,会尝试在 Host 侧处理,KVM 通知 QEMU 的 vCPU 线程主动 sleep 降低 split lock 产生的频率,甚至 kill 虚拟机。以上的结论也只是截止目前 2022/4/19(下同)的情况,近 2 年社区仍对 split lock 的处理有不同的看法,处理方式也是改变了多次,所以以下的分析仅讨论目前的情况。
我们假设一个最简单的计算模型,一个 CPU(单核、没有开启 Hyper-threading、没有 Cache),一块内存。上面运行一个 C 程序在执行i++,对应的汇编代码是add 1, i。
分析一下这里add指令的语义,需要两个操作数,源操作数 SRC 和目的操作数 DEST,实现的功能是DEST = DEST + SRC。这里 SRC 是立即数 1,DEST 是 i 的内存地址,CPU 需要先在内存中读出 i 的内容,然后加 1,最后把结果写入 i 所在的内存地址。总共产生了两次串行的内存操作。
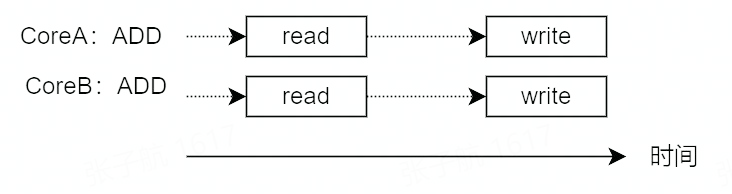
如果计算架构复杂一点,有 2 个 CPU 核 CoreA 和 CoreB 的情况下,上面的i++代码就不得不考虑数据一致性的问题:
如果 CoreA 正在向 i 的内存地址中写入时,CoreB 同时向 i 的内存地址写入怎么办?
具体的操作有:
如果 CoreA 从内存中读出 i 后,写入 i 所在内存地址前这段时间内,CoreB 向 i 的内存地址写入数据怎么办?
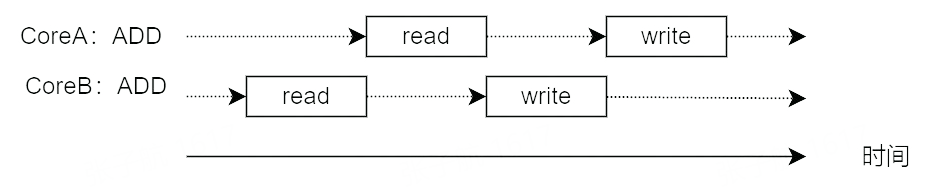
为什么会出现这个问题呢?就是因为 ADD 指令不是原子操作,会产生两次内存操作。
那怎么解决这个问题呢?既然 ADD 指令在硬件上不是原子的,那么就从软件上加锁来实现原子操作,使 CoreB 的的内存操作在 CoreA 的内存操作完成前不能执行。

LOCK,汇编代码变为lock add 1, i。
LOCK指令前缀声明后,随同执行的指令会变为原子指令。原理就是在随同指令执行期间,锁住系统总线,禁止其他处理器进行内存操作,使其独占内存来实现原子操作。
QEMU 中的函数 qatomic_inc(ptr),把参数 ptr 指向的内存数据进行进行加 1。
#define qatomic_inc(ptr) ((void) __sync_fetch_and_add(ptr, 1))
原理是调用 GCC 内置的__sync_fetch_and_add 函数,我们手写一个 C 程序,看下__sync_fetch_and_add 的汇编实现。
int main() {
int i = 1;
int *p = &i;
while(1) {
__sync_fetch_and_add(p, 1);
}
return 0;
}// add.s
.file "add.c"
.text
.globl main
.type main, @function
main:
.LFB0:
.cfi_startproc
pushq %rbp
.cfi_def_cfa_offset 16
.cfi_offset 6, -16
movq %rsp, %rbp
.cfi_def_cfa_register 6
movl $1, -12(%rbp)
leaq -12(%rbp), %rax
movq %rax, -8(%rbp)
.L2:
movq -8(%rbp), %rax
lock addl $1, (%rax)
jmp .L2
.cfi_endproc
.LFE0:
.size main, .-main
.ident "GCC: (Debian 6.3.0-18+deb9u1) 6.3.0 20170516"
.section .note.GNU-stack,"",@progbits可以看到__sync_fetch_and_add 的汇编实现就是在 add 指令前声明了 lock 指令前缀。
Kernel 中的 atomic_inc 函数,把参数 v 指向的内存数据进行进行加 1。
static __always_inline void
atomic_inc(atomic_t *v)
{
instrument_atomic_read_write(v, sizeof(*v));
arch_atomic_inc(v);
}
static __always_inline void arch_atomic_inc(atomic_t *v)
{
asm volatile(LOCK_PREFIX "incl %0"
: "+m" (v->counter) :: "memory");
}
#define LOCK_PREFIX LOCK_PREFIX_HERE "\n\tlock; "可以看到,同样是声明了 lock 指令前缀。
编程语言中的 CAS 接口为开发者提供了原子操作,实现无锁机制。
// bool Cas(int32 *val, int32 old, int32 new)
// Atomically:
// if(*val == old){
// *val = new;
// return 1;
// } else
// return 0;
TEXT ·Cas(SB),NOSPLIT,$0-17
MOVQ ptr+0(FP), BX
MOVL old+8(FP), AX
MOVL new+12(FP), CX
LOCK
CMPXCHGL CX, 0(BX)
SETEQ ret+16(FP)
RETinline jlong Atomic::cmpxchg (jlong exchange_value, volatile jlong* dest, jlong compare_value) {
bool mp = os::is_MP();
__asm__ __volatile__ (LOCK_IF_MP(%4) "cmpxchgq %1,(%3)"
: "=a" (exchange_value)
: "r" (exchange_value), "a" (compare_value), "r" (dest), "r" (mp)
: "cc", "memory");
return exchange_value;
}
// Adding a lock prefix to an instruction on MP machine
#define LOCK_IF_MP(mp) "cmp $0, " #mp "; je 1f; lock; 1: "可以看到,CAS 同样是使用 lock 指令前缀来实现的,那么 lock 指令前缀具体是怎么实现的呢?
具体来说,代码中的指令前面声明了 LOCK 前缀指令后,处理器就会在指令运行期间产生 LOCK#信号,使其他处理器不能通过总线访问内存。
我们尝试从 8086 CPU 的引脚图中管中窥豹,了解下 LOCK#信号的原理。

所以整个流程就清晰了,当想要通过非原子指令(例如 add)实现原子操作时,编程时需要在指令前声明 lock 指令前缀,运行时 lock 指令前缀会被处理器识别出来,并产生 LOCK#信号,使其独占内存总线,而其他处理器则无法通过内存总线访问内存,这样就实现了原子操作。所以也就解决了上面的写覆盖问题了。
看起来很好,不过这样又引入了一个新问题:
现在处理器的核越来越多,如果每个核都频繁的产生 LOCK#信号,来独占内存总线,这样其余的核不能访问内存,导致性能会有很大的下降,该怎么办?
INTEL 为了优化总线锁导致的性能问题,在 P6 后的处理器上,引入了缓存锁(cache locking)机制:通过缓存一致性协议保证多个 CPU 核访问跨 cache line 的内存地址的多次访问的原子性与一致性,而不需要锁内存总线。
先以常见的 MESI 简单介绍一下缓存一致性协议。MESI 分为四种状态:
MESI 协议状态机如下:
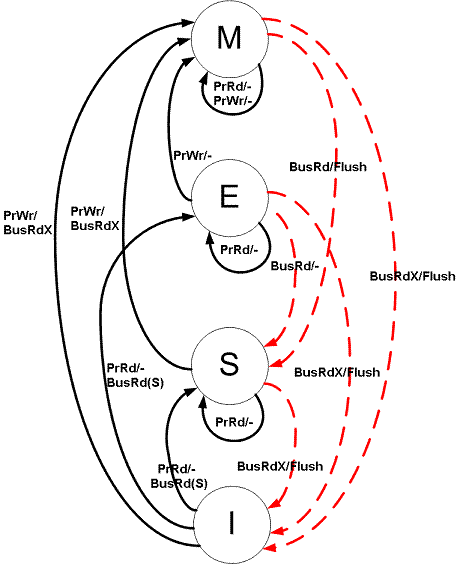
a. PrRd: CPU 请求读一个缓存块
b. PrWr: CPU 请求写一个缓存块
2 . 总线产生对 cache 的请求
a. BusRd: 窥探器请求指出其他处理器请求读一个缓存块
b. BusRdX: 窥探器请求指出其他处理器请求写一个该处理器不拥有的缓存块
c. BusUpgr: 窥探器请求指出其他处理器请求写一个该处理器拥有的缓存块
d. Flush: 窥探器请求指出请求回写整个缓存到主存
e. FlushOpt: 窥探器请求指出整个缓存块被发到总线以发送给另外一个处理器(缓存到缓存的复制)
简单来说,通过 MESI 协议,每个 CPU 不仅知道自身对 cache 的读写操作,还进行总线嗅探(snooping),可以知道其他 CPU 对 cache 的的读写操作,所以除了自身对 cache 的修改也会根据其他 CPU 对 cache 的修改来改变 cache 的状态。
缓存锁是依赖缓存一致性协议来保证内存访问的原子性,因为缓存一致性协议会阻止被多个 CPU 缓存的内存地址被多个 CPU 同时修改。
下面我们以一个例子分析缓存锁是如何基于 MESI 协议实现内存读写的原子性。
我们还是假设有两个 CPU Core,CoreA 与 CoreB 进行分析。

可以看到 CoreB 修改的数据没有丢失,被同步给了 CoreA 与主存。并且实现上述的操作没有锁内存总线,只是 CoreA 的修改操作被堵塞了一下,这相比锁整个内存总线是可控的。
上面是一个比较简单的情况,两个 CPU Core 的写入是串行的。那么如果在操作步骤 2 后,CoreA 与 CoreB 同时下发写请求呢?会产生两个 Core 的 cache 都进入 M 状态吗?
答案是否定的,MESI 协议保证了上面同时进入 M 的情况不会发生。根据 MESI 协议,一个 Core 的 PrWr 操作只能在其 cache 为 M 或 E 状态时自由的执行,如果是 S 状态,其他 Core 的 cache 必须先被设置为 I 状态,实现的方式是通过一个叫 Request For Ownership(RFO)的总线广播进行的,RFO 是一个总线事务,如果两个 Core 同时向总线进行 RFO 广播都想 Invalid 对方的 cache,总线会进行仲裁,最终结果会是只有一个 Core 广播成功,而另一个 Core 会失败,其 cache 会被设置为 I 状态。所以我们能看到,引入 cache 层后,原子操作由锁内存总线变为了由总线仲裁来实现。
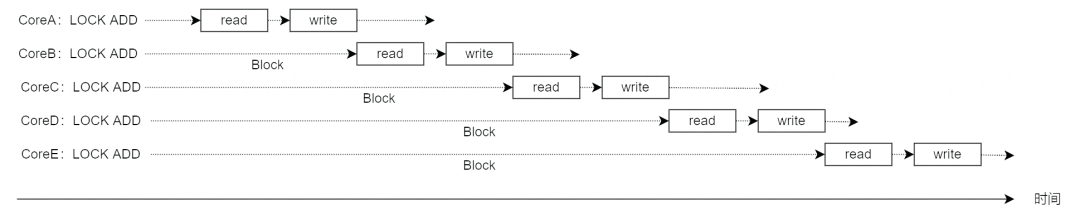
如果声明了 LOCK 指令前缀,那么对应的 cache 地址会被总线锁定,在上面的例子中,其他 Core 在访问时会等到指令执行结束后再进行访问,也即变为了串行操作,实现了对 cache 读写的原子性。
那么总结一下缓存锁:在代码指令前面声明了 LOCK 指令前缀,想要原子访问内存数据,如果内存数据可以被缓存在 CPU 的 cache 中,运行时通常不会在总线上产生 LOCK#信号,而是通过缓存一致性协议、总线仲裁机制与 cache 锁定来阻止两个或以上的 CPU 核,对同一块地址的并发访问。
那么是不是所有的总线锁都可以被优化为缓存锁呢?答案是否定的,不能被优化的情况就是 split lock。
由于缓存一致性协议的粒度是一个 cache line,当原子操作的数据跨 cache line 时,依赖缓存锁机制无法保证数据一致性,会退化为总线锁来保证一致性,这种情况就是 split lock,split 也可以理解为访存的 cache 被 split 为两个 line。
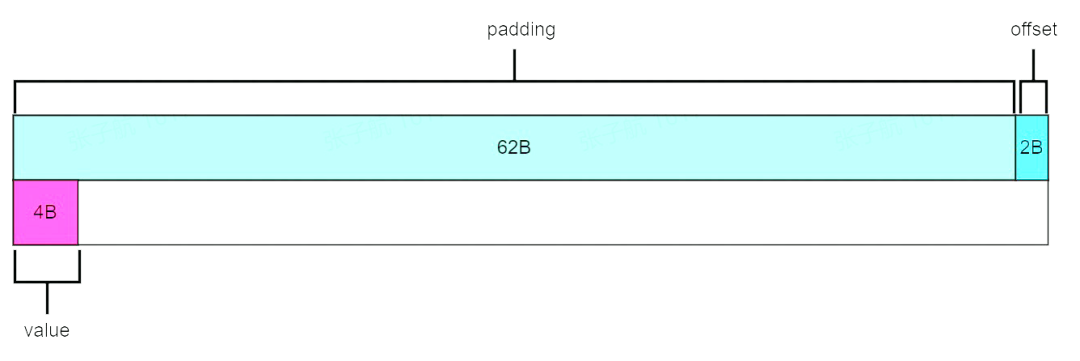
比如有如下数据结构:
struct Data {
char padding[62]; // 62字节
int32_t value; // 4字节
} __attribute__((packed)) // 按实际字节对齐被缓存到 cache line 大小为 64 字节的 cache 中时,value 成员会跨 cache line。
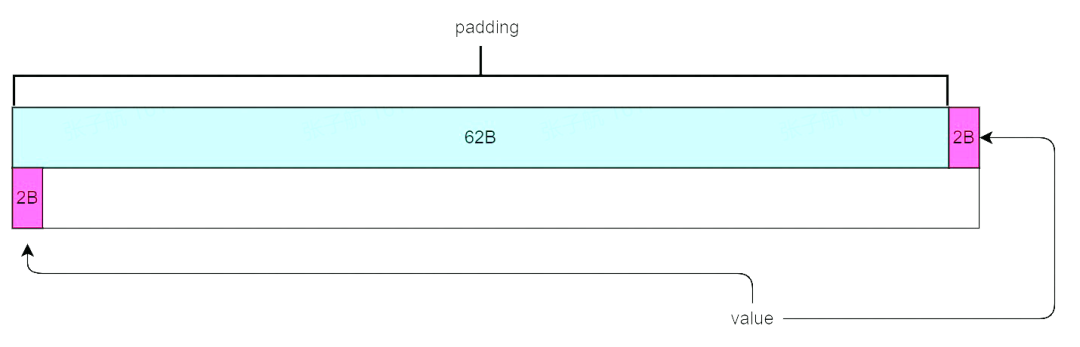
LOCK ADD 指令操作 Data 结构中的 value 成员,就无法通过缓存锁解决,只能走老路,锁总线来保证数据一致性。
而锁总线会引起严重的性能下降,访存延迟增加百倍左右,如果是内存密集型业务,性能会下降 2 个数量级。所以在现代 X86 处理器中,要避免写出会产生 split lock 的代码,并有能力检测出 Split lock 的产生。
回顾一下 Split lock 的产生条件:
因为原子操作是比较基础的操作,所以我们以数据跨 cache line 存储为介入点进行分析。
如果数据只存储在一个 cache line 中,那就可以解决问题。
我们前面的数据结构中有用到 __attribute__((packed)) 这个 GCC 的特性,表示不进行内存对齐优化。
如果不引入 __attribute__((packed)),使用内存对齐优化时,编译器会对内存数据进行填充,比如在 padding 后填入 2 字节,使 value 的内存地址可以被 4 字节整除,从而达到对齐。被缓存到 cache 中时 value 也就不会跨 cache line 了。
__attribute__((packed))呢?
这是因为通过 __attribute__((packed)) 强制按数据结构对齐,也有好处。比如基于数据结构的网络通信,不需要填充多余字节等。
我们在编写代码过程中,有以下几点需要注意:
下面主要针对云环境,自底向上进行分析。
当尝试 split lock 操作时会产生 Alignment Check (#AC) exception,当获取 bus lock 并执行后会产生 Debug(#DB) trap。
硬件这里区分下了 split lock 与 bus lock:
概念上,split lock 是 bus lock 的一种,split lock 倾向于跨 cache line 访问,bus lock 倾向锁总线的操作。
发生 split lock 和 bus lock 时是否产生对应的 exception,可以由特定的寄存器控制,下面是相关的控制寄存器。

以 v5.17 版本为例进行分析。当前版本内核支持一个相关启动参数 split_lock_detect,配置项和对应功能如下:

-> start_kernel
-> sld_setup
-> split_lock_setup
-> __split_lock_setup
-> sld_state_setup内核启动时,会先进行 sld(split lock detect)的 setup。
static void __init __split_lock_setup(void)
{
if (!split_lock_verify_msr(false)) {
pr_info("MSR access failed: Disabled\n");
return;
}
rdmsrl(MSR_TEST_CTRL, msr_test_ctrl_cache);
if (!split_lock_verify_msr(true)) {
pr_info("MSR access failed: Disabled\n");
return;
}
/* Restore the MSR to its cached value. */
wrmsrl(MSR_TEST_CTRL, msr_test_ctrl_cache);
setup_force_cpu_cap(X86_FEATURE_SPLIT_LOCK_DETECT);
}
static bool split_lock_verify_msr(bool on)
{
u64 ctrl, tmp;
if (rdmsrl_safe(MSR_TEST_CTRL, &ctrl))
return false;
if (on)
ctrl |= MSR_TEST_CTRL_SPLIT_LOCK_DETECT;
else
ctrl &= ~MSR_TEST_CTRL_SPLIT_LOCK_DETECT;
if (wrmsrl_safe(MSR_TEST_CTRL, ctrl))
return false;
rdmsrl(MSR_TEST_CTRL, tmp);
return ctrl == tmp;
}
#define MSR_TEST_CTRL 0x00000033__split_lock_setup 中尝试 enable/disable 33H MSR 进行 verify,结束也并没有 enable split lock #AC exception,而是仅留下一个全局变量 msr_test_ctrl_cache 当作后面操作这个 MSR 的 cache 使用。
static void __init sld_state_setup(void)
{
enum split_lock_detect_state state = sld_warn; // 默认配置
char arg[20];
int i, ret;
if (!boot_cpu_has(X86_FEATURE_SPLIT_LOCK_DETECT) &&
!boot_cpu_has(X86_FEATURE_BUS_LOCK_DETECT))
return;
ret = cmdline_find_option(boot_command_line, "split_lock_detect",
arg, sizeof(arg));
if (ret >= 0) {
for (i = 0; i < ARRAY_SIZE(sld_options); i++) {
if (match_option(arg, ret, sld_options[i].option)) {
state = sld_options[i].state;
break;
}
}
}
sld_state = state;
}
static inline bool match_option(const char *arg, int arglen, const char *opt)
{
int len = strlen(opt), ratelimit;
if (strncmp(arg, opt, len))
return false;
/*
* Min ratelimit is 1 bus lock/sec.
* Max ratelimit is 1000 bus locks/sec.
*/
if (sscanf(arg, "ratelimit:%d", &ratelimit) == 1 &&
ratelimit > 0 && ratelimit <= 1000) {
ratelimit_state_init(&bld_ratelimit, HZ, ratelimit);
ratelimit_set_flags(&bld_ratelimit, RATELIMIT_MSG_ON_RELEASE);
return true;
}
return len == arglen;
}sld_state_setup 做的是解析出内核启动参数 split_lock_detect 的配置(可以看到默认的配置是 warn 级别),如果是 ratelimit 配置,会使用内核的 ratelimit 库初始化一个 bld_ratelimit 全局变量给 handle 阶段用。
-> start_kernel
-> init_intel
-> split_lock_init
-> bus_lock_initsetup 完成基本的 verify 和获取启动参数配置后,会尝试进行硬件 enbale 操作。
static void split_lock_init(void)
{
/*
* #DB for bus lock handles ratelimit and #AC for split lock is
* disabled.
*/
if (sld_state == sld_ratelimit) {
split_lock_verify_msr(false);
return;
}
if (cpu_model_supports_sld)
split_lock_verify_msr(sld_state != sld_off);
}split lock 的 init 中,如果发现配置的参数是 ratelimit,会 disable split lock 的硬件检测。其他非 off 参数(warn、fatal)则会 enable 硬件。
static void bus_lock_init(void)
{
u64 val;
/*
* Warn and fatal are handled by #AC for split lock if #AC for
* split lock is supported.
*/
if (!boot_cpu_has(X86_FEATURE_BUS_LOCK_DETECT) ||
(boot_cpu_has(X86_FEATURE_SPLIT_LOCK_DETECT) &&
(sld_state == sld_warn || sld_state == sld_fatal)) ||
sld_state == sld_off)
return;
/*
* Enable #DB for bus lock. All bus locks are handled in #DB except
* split locks are handled in #AC in the fatal case.
*/
rdmsrl(MSR_IA32_DEBUGCTLMSR, val);
val |= DEBUGCTLMSR_BUS_LOCK_DETECT;
wrmsrl(MSR_IA32_DEBUGCTLMSR, val);
}
#define DEBUGCTLMSR_BUS_LOCK_DETECT (1UL << 2)bus lock 的 init 中,如果 CPU 不支持 bus lock 则不会 enable bus lock 的硬件检测,如果 CPU 同时支持 split lock 与 bus lock 的硬件检测并且配置参数还是 warn 或 fatal 时也不会 enable 硬件。
所以从代码看 enable CPU 的 bus lock 检测情况有两种:一是 CPU 支持 bus lock 检测的情况下并且配置参数指定为 ratelimt,二是 CPU 不支持 split lock 检测但支持 bus lock 检测并且配置参数非 off。
DEFINE_IDTENTRY_ERRORCODE(exc_alignment_check)
{
char *str = "alignment check";
if (notify_die(DIE_TRAP, str, regs, error_code, X86_TRAP_AC, SIGBUS) == NOTIFY_STOP)
return;
if (!user_mode(regs)) // 如果不是用户态
die("Split lock detected\n", regs, error_code);
local_irq_enable();
if (handle_user_split_lock(regs, error_code))
goto out;
do_trap(X86_TRAP_AC, SIGBUS, "alignment check", regs,
error_code, BUS_ADRALN, NULL);
out:
local_irq_disable();
}
bool handle_user_split_lock(struct pt_regs *regs, long error_code)
{
if ((regs->flags & X86_EFLAGS_AC) || sld_state == sld_fatal)
return false;
split_lock_warn(regs->ip);
return true;
}
static void split_lock_warn(unsigned long ip)
{
pr_warn_ratelimited("#AC: %s/%d took a split_lock trap at address: 0x%lx\n",
current->comm, current->pid, ip);
/*
* Disable the split lock detection for this task so it can make
* progress and set TIF_SLD so the detection is re-enabled via
* switch_to_sld() when the task is scheduled out.
*/
sld_update_msr(false);
set_tsk_thread_flag(current, TIF_SLD);
}#AC exception 产生后,如果不是用户态,会调用 die,进入 panic 流程。
如果是在用户态,那么配置为 fatal 时就会向当前用户态进程发送 SIGBUS 信号,用户态进程不手动捕获 SIGBUS 就会被 kill。
如果是用户态,配置为 warn 时,会打印一条警告日志并输出当前进程信息,同时 disable split lock 的检测,并通过设置当前进程 flags 的 TIF_SLD 位表示这个进程已经被检测过一次了。
-> context_switch
-> __switch_to_xtra
void __switch_to_xtra(struct task_struct *prev_p, struct task_struct *next_p)
{
unsigned long tifp, tifn;
tifn = read_task_thread_flags(next_p);
tifp = read_task_thread_flags(prev_p);
if ((tifp ^ tifn) & _TIF_SLD)
switch_to_sld(tifn);
}
void switch_to_sld(unsigned long tifn)
{
sld_update_msr(!(tifn & _TIF_SLD));
}在 context_switch 进行进程切换时,如果 prev 进程和 next 进程的 flags 中 TIF_SLD 位不同,那么就会进行 split lock detect 的切换,切换的依据是 next 进程的 TIF_SLD 位。
举个例子,CPU 0 上进程 A 在触发了一次 split lock 的 warn 检测后,CPU 0 的 split lock 检测会被 disable,避免频繁产生警告日志,进程 A 的 flags 置位 TIF_SLD,进程 A 执行完成后,切换到进程 B 运行在 CPU 0 上,切换时由于 A 与 B 的 flags 的 TIF_SLD 位不同,我们就再根据进程 B 的 flags 来 enable split lock 的检测,进程 B 执行完成后,再次切换到进程 A 运行时,会再 disable split lock。
上面的机制就实现了每个进程只 warn once 的需求。
static __always_inline void exc_debug_user(struct pt_regs *regs,
unsigned long dr6)
{
/* #DB for bus lock can only be triggered from userspace. */
if (dr6 & DR_BUS_LOCK)
handle_bus_lock(regs);
}
void handle_bus_lock(struct pt_regs *regs)
{
switch (sld_state) {
case sld_off:
break;
case sld_ratelimit:
/* Enforce no more than bld_ratelimit bus locks/sec. */
while (!__ratelimit(&bld_ratelimit))
msleep(20);
/* Warn on the bus lock. */
fallthrough;
case sld_warn:
pr_warn_ratelimited("#DB: %s/%d took a bus_lock trap at address: 0x%lx\n",
current->comm, current->pid, regs->ip);
break;
case sld_fatal:
force_sig_fault(SIGBUS, BUS_ADRALN, NULL);
break;
}
}#DB trap 产生后,warn 和 fatal 的流程和#AC 基本差不多,我们这里重点分析 ratelimit,这也是引入 bus lock 的一个强需求。
强制把 bus lock 产生的频率降低到配置的 ratelimit。原理就是如果频率超出设定,就直接 sleep 20 ms,直到频率降下来(这里的频率是整个系统产生 bus lock 的频率)。
降频过后通过编译器的 fallthrough 流入 sld_warn case 产生一条警告日志。
前面的分析都是针对物理机上的内核与用户态程序(VMX root mode)。在虚拟化环境中需要再考虑一些问题,比如如果 split lock 来自于 Guest 中,Host 如何检测?怎么避免对其他 Guest 的影响?如果直接在 Host 上 enable bus lock ratelimit,可能会影响没有准备好的 Guest。如果直接把 split lock 的检测开关暴露给 Guest,Host 或其他 Guest 怎么处理等等。
CPU 可以在 VMX mode 下支持 split lock 检测的#AC trap,后面具体怎么做由 hypervisor 决定。大部分 hypervisor 会直接把 trap 转发到 Guest 中,如果 Guest 没有准备好,可能会产生 crash。之前的 VMX 版本中就有这个问题。
因此首先就要让 hypervisor 正确处理 trap。
下面是虚拟化环境对 split lock 与 bus lock 的整体处理流程图:
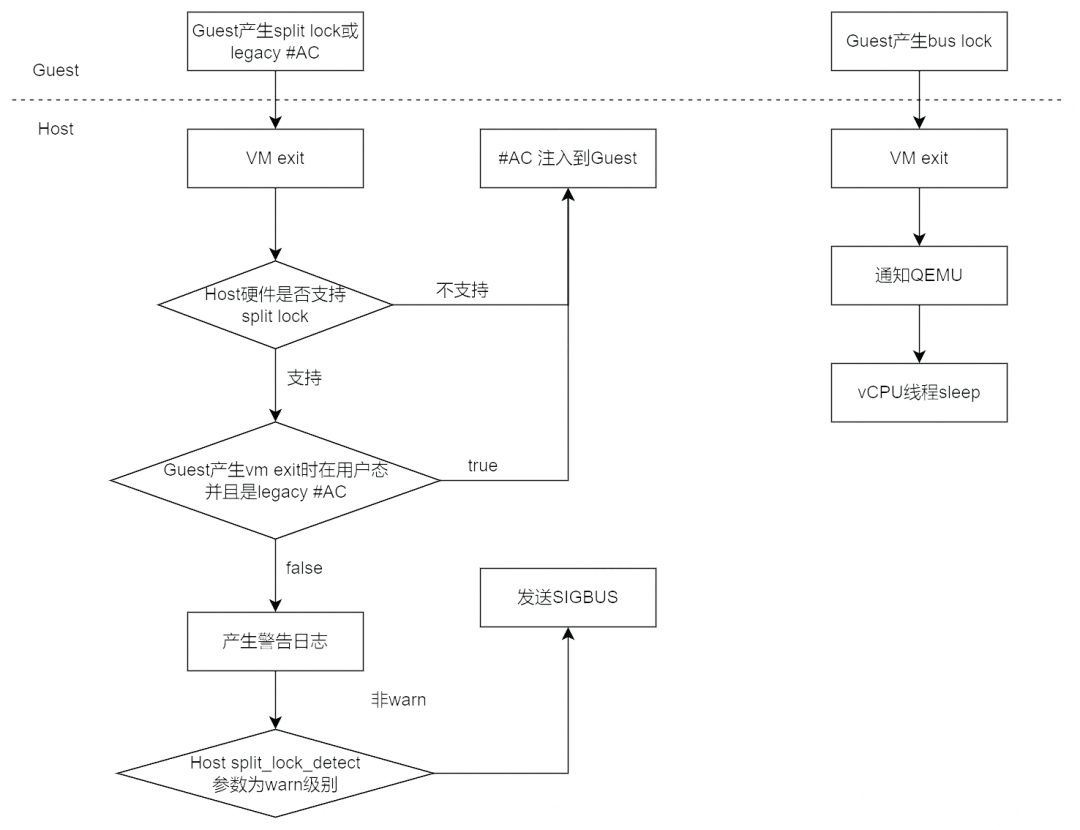
Guest 进行 bus lock 后,会 vm exit 到 kvm 中,kvm 通知 QEMU,vCPU 线程会主动进行 sleep 降频。
下面我们再自底向上进行分析。


-> vmx_handle_exit
-> __vmx_handle_exit
-> kvm_vmx_exit_handlers
-> handle_exception_nmi // split lock
-> handle_bus_lock_vmexit // bus lockstatic int handle_exception_nmi(struct kvm_vcpu *vcpu)
{
switch (ex_no) {
case AC_VECTOR:
if (vmx_guest_inject_ac(vcpu)) {
kvm_queue_exception_e(vcpu, AC_VECTOR, error_code);
return 1;
}
/*
* Handle split lock. Depending on detection mode this will
* either warn and disable split lock detection for this
* task or force SIGBUS on it.
*/
if (handle_guest_split_lock(kvm_rip_read(vcpu)))
return 1;
}
// Guest handle
bool vmx_guest_inject_ac(struct kvm_vcpu *vcpu)
{
if (!boot_cpu_has(X86_FEATURE_SPLIT_LOCK_DETECT))
return true;
return vmx_get_cpl(vcpu) == 3 && kvm_read_cr0_bits(vcpu, X86_CR0_AM) &&
(kvm_get_rflags(vcpu) & X86_EFLAGS_AC);
}
// KVM handle
bool handle_guest_split_lock(unsigned long ip)
{
if (sld_state == sld_warn) {
split_lock_warn(ip);
return true;
}
pr_warn_once("#AC: %s/%d %s split_lock trap at address: 0x%lx\n",
current->comm, current->pid,
sld_state == sld_fatal ? "fatal" : "bogus", ip);
current->thread.error_code = 0;
current->thread.trap_nr = X86_TRAP_AC;
force_sig_fault(SIGBUS, BUS_ADRALN, NULL);
return false;
}Guest 内部产生 split lock 操作时,由于是#AC exception,会 VM exit 出来。
这里首先要说明一下#AC exception 本身有两种类型:
KVM 根据 Host 和 Guest 状态最终产生两种行为:
1 . 让 Guest 处理:把#AC 注入到 Guest 中。
2 . 让 HOST 处理:产生警告甚至发送 SIGBUS。
#define EXIT_REASON_BUS_LOCK 74
static int (*kvm_vmx_exit_handlers[])(struct kvm_vcpu *vcpu) = {
[EXIT_REASON_BUS_LOCK] = handle_bus_lock_vmexit,
}
static int handle_bus_lock_vmexit(struct kvm_vcpu *vcpu)
{
/*
* Hardware may or may not set the BUS_LOCK_DETECTED flag on BUS_LOCK
* VM-Exits. Unconditionally set the flag here and leave the handling to
* vmx_handle_exit().
*/
to_vmx(vcpu)->exit_reason.bus_lock_detected = true;
return 1;
}
union vmx_exit_reason {
struct {
u32 basic : 16;
u32 reserved16 : 1;
u32 reserved17 : 1;
u32 reserved18 : 1;
u32 reserved19 : 1;
u32 reserved20 : 1;
u32 reserved21 : 1;
u32 reserved22 : 1;
u32 reserved23 : 1;
u32 reserved24 : 1;
u32 reserved25 : 1;
u32 bus_lock_detected : 1;
u32 enclave_mode : 1;
u32 smi_pending_mtf : 1;
u32 smi_from_vmx_root : 1;
u32 reserved30 : 1;
u32 failed_vmentry : 1;
};
u32 full;
};VM exit 后,执行根据 reason 74 索引的函数 handle_bus_lock_vmexit,其中仅仅是把 exit_reason 的 bus_lock_detected 置位。
static int vmx_handle_exit(struct kvm_vcpu *vcpu, fastpath_t exit_fastpath)
{
int ret = __vmx_handle_exit(vcpu, exit_fastpath);
/*
* Exit to user space when bus lock detected to inform that there is
* a bus lock in guest.
*/
if (to_vmx(vcpu)->exit_reason.bus_lock_detected) {
if (ret > 0)
vcpu->run->exit_reason = KVM_EXIT_X86_BUS_LOCK;
vcpu->run->flags |= KVM_RUN_X86_BUS_LOCK;
return 0;
}
return ret;
}执行完__vmx_handle_exit 后,检测到 bus_lock_detected 置位后会设置返回给用户态的 exit_reason 和 flags。
以 v6.2.0 版本为例进行分析:
-> kvm_cpu_exec
-> kvm_vcpu_ioctl
-> kvm_arch_post_run
-> kvm_arch_handle_exit
int kvm_arch_handle_exit(CPUState *cs, struct kvm_run *run)
{
switch (run->exit_reason) {
case KVM_EXIT_X86_BUS_LOCK:
/* already handled in kvm_arch_post_run */
ret = 0;
break;
}
}
MemTxAttrs kvm_arch_post_run(CPUState *cpu, struct kvm_run *run) {
if (run->flags & KVM_RUN_X86_BUS_LOCK) {
kvm_rate_limit_on_bus_lock();
}
}
static void kvm_rate_limit_on_bus_lock(void)
{
uint64_t delay_ns = ratelimit_calculate_delay(&bus_lock_ratelimit_ctrl, 1);
if (delay_ns) {
g_usleep(delay_ns / SCALE_US);
}
}QEMU 通过 KVM 返回值了解到 Guest 中有 bus lock 产生,进入 kvm_rate_limit_on_bus_lock 中,也是通过 sleep 实现 ratelimit,达到降低 Guest 产生 bus lock 频率的效果。
Host 上的 ratelimit 是通过 split_lock_detect 启动参数来控制的,那么 Guest 呢?
int kvm_arch_init(MachineState *ms, KVMState *s) {
if (object_dynamic_cast(OBJECT(ms), TYPE_X86_MACHINE)) {
X86MachineState *x86ms = X86_MACHINE(ms);
if (x86ms->bus_lock_ratelimit > 0) {
ret = kvm_check_extension(s, KVM_CAP_X86_BUS_LOCK_EXIT);
if (!(ret & KVM_BUS_LOCK_DETECTION_EXIT)) {
error_report("kvm: bus lock detection unsupported");
return -ENOTSUP;
}
ret = kvm_vm_enable_cap(s, KVM_CAP_X86_BUS_LOCK_EXIT, 0,
KVM_BUS_LOCK_DETECTION_EXIT);
if (ret < 0) {
error_report("kvm: Failed to enable bus lock detection cap: %s",
strerror(-ret));
return ret;
}
ratelimit_init(&bus_lock_ratelimit_ctrl);
ratelimit_set_speed(&bus_lock_ratelimit_ctrl,
x86ms->bus_lock_ratelimit, BUS_LOCK_SLICE_TIME);
}
}
}
static void x86_machine_get_bus_lock_ratelimit(Object *obj, Visitor *v,
const char *name, void *opaque, Error **errp)
{
X86MachineState *x86ms = X86_MACHINE(obj);
uint64_t bus_lock_ratelimit = x86ms->bus_lock_ratelimit;
visit_type_uint64(v, name, &bus_lock_ratelimit, errp);
}
static void x86_machine_class_init(ObjectClass *oc, void *data)
{
object_class_property_add(oc, X86_MACHINE_BUS_LOCK_RATELIMIT, "uint64_t",
x86_machine_get_bus_lock_ratelimit,
x86_machine_set_bus_lock_ratelimit, NULL, NULL);
}
#define X86_MACHINE_BUS_LOCK_RATELIMIT "bus-lock-ratelimit"QEMU 对 Guest bus lock 的 ratelimit 从启动参数 bus-lock-ratelimit 中获取。
Libvirt 支持 QEMU 的 bus-lock-ratelimit 启动参数目前还没 upsteam:
https://listman.redhat.com/archives/libvir-list/2021-December/225755.html
由于 X86 硬件的特性,支持跨 cache line 的原子语义,实现上需要用 split lock 维持原子性,但这却需要以整个系统的访存性能为代价。开发者逐渐意识到这个 feature 害人不浅,尽量不去使用,比如内核的开发者保证自己不会产生 split lock,甚至不惜内核 panic。而用户态程序则会产生警告,然后降低程序的执行频率或者由内核进行 kill。虚拟化环境由于软件栈较多,会尽量由 Host 侧 KVM 与 QEMU 处理,进行告警甚至 kill 虚拟机,或通知 QEMU 进行降频。
本文由哈喽比特于3年以前收录,如有侵权请联系我们。
文章来源:https://mp.weixin.qq.com/s/WeKM58WF6hVaxT3vRuQ2zg
京东创始人刘强东和其妻子章泽天最近成为了互联网舆论关注的焦点。有关他们“移民美国”和在美国购买豪宅的传言在互联网上广泛传播。然而,京东官方通过微博发言人发布的消息澄清了这些传言,称这些言论纯属虚假信息和蓄意捏造。
日前,据博主“@超能数码君老周”爆料,国内三大运营商中国移动、中国电信和中国联通预计将集体采购百万台规模的华为Mate60系列手机。
据报道,荷兰半导体设备公司ASML正看到美国对华遏制政策的负面影响。阿斯麦(ASML)CEO彼得·温宁克在一档电视节目中分享了他对中国大陆问题以及该公司面临的出口管制和保护主义的看法。彼得曾在多个场合表达了他对出口管制以及中荷经济关系的担忧。
今年早些时候,抖音悄然上线了一款名为“青桃”的 App,Slogan 为“看见你的热爱”,根据应用介绍可知,“青桃”是一个属于年轻人的兴趣知识视频平台,由抖音官方出品的中长视频关联版本,整体风格有些类似B站。
日前,威马汽车首席数据官梅松林转发了一份“世界各国地区拥车率排行榜”,同时,他发文表示:中国汽车普及率低于非洲国家尼日利亚,每百户家庭仅17户有车。意大利世界排名第一,每十户中九户有车。
近日,一项新的研究发现,维生素 C 和 E 等抗氧化剂会激活一种机制,刺激癌症肿瘤中新血管的生长,帮助它们生长和扩散。
据媒体援引消息人士报道,苹果公司正在测试使用3D打印技术来生产其智能手表的钢质底盘。消息传出后,3D系统一度大涨超10%,不过截至周三收盘,该股涨幅回落至2%以内。
9月2日,坐拥千万粉丝的网红主播“秀才”账号被封禁,在社交媒体平台上引发热议。平台相关负责人表示,“秀才”账号违反平台相关规定,已封禁。据知情人士透露,秀才近期被举报存在违法行为,这可能是他被封禁的部分原因。据悉,“秀才”年龄39岁,是安徽省亳州市蒙城县人,抖音网红,粉丝数量超1200万。他曾被称为“中老年...
9月3日消息,亚马逊的一些股东,包括持有该公司股票的一家养老基金,日前对亚马逊、其创始人贝索斯和其董事会提起诉讼,指控他们在为 Project Kuiper 卫星星座项目购买发射服务时“违反了信义义务”。
据消息,为推广自家应用,苹果现推出了一个名为“Apps by Apple”的网站,展示了苹果为旗下产品(如 iPhone、iPad、Apple Watch、Mac 和 Apple TV)开发的各种应用程序。
特斯拉本周在美国大幅下调Model S和X售价,引发了该公司一些最坚定支持者的不满。知名特斯拉多头、未来基金(Future Fund)管理合伙人加里·布莱克发帖称,降价是一种“短期麻醉剂”,会让潜在客户等待进一步降价。
据外媒9月2日报道,荷兰半导体设备制造商阿斯麦称,尽管荷兰政府颁布的半导体设备出口管制新规9月正式生效,但该公司已获得在2023年底以前向中国运送受限制芯片制造机器的许可。
近日,根据美国证券交易委员会的文件显示,苹果卫星服务提供商 Globalstar 近期向马斯克旗下的 SpaceX 支付 6400 万美元(约 4.65 亿元人民币)。用于在 2023-2025 年期间,发射卫星,进一步扩展苹果 iPhone 系列的 SOS 卫星服务。
据报道,马斯克旗下社交平台𝕏(推特)日前调整了隐私政策,允许 𝕏 使用用户发布的信息来训练其人工智能(AI)模型。新的隐私政策将于 9 月 29 日生效。新政策规定,𝕏可能会使用所收集到的平台信息和公开可用的信息,来帮助训练 𝕏 的机器学习或人工智能模型。
9月2日,荣耀CEO赵明在采访中谈及华为手机回归时表示,替老同事们高兴,觉得手机行业,由于华为的回归,让竞争充满了更多的可能性和更多的魅力,对行业来说也是件好事。
《自然》30日发表的一篇论文报道了一个名为Swift的人工智能(AI)系统,该系统驾驶无人机的能力可在真实世界中一对一冠军赛里战胜人类对手。
近日,非营利组织纽约真菌学会(NYMS)发出警告,表示亚马逊为代表的电商平台上,充斥着各种AI生成的蘑菇觅食科普书籍,其中存在诸多错误。
社交媒体平台𝕏(原推特)新隐私政策提到:“在您同意的情况下,我们可能出于安全、安保和身份识别目的收集和使用您的生物识别信息。”
2023年德国柏林消费电子展上,各大企业都带来了最新的理念和产品,而高端化、本土化的中国产品正在不断吸引欧洲等国际市场的目光。
罗永浩日前在直播中吐槽苹果即将推出的 iPhone 新品,具体内容为:“以我对我‘子公司’的了解,我认为 iPhone 15 跟 iPhone 14 不会有什么区别的,除了序(列)号变了,这个‘不要脸’的东西,这个‘臭厨子’。